Home
This is a fork of Ardupilot for OpenPilot Revolution/RevoMini boards and derived family of flight controllers. It contain an HAL written from scratch for the following boards:
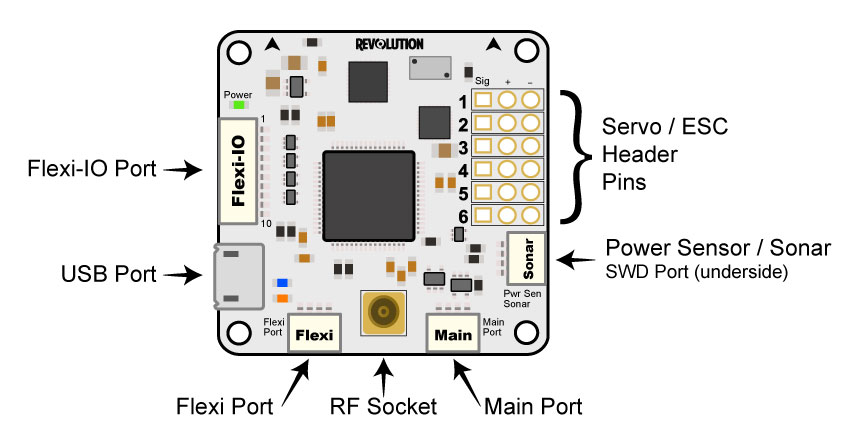
- OpenPilot Revolution / RevoMini (target revomini_MP32V1F4)
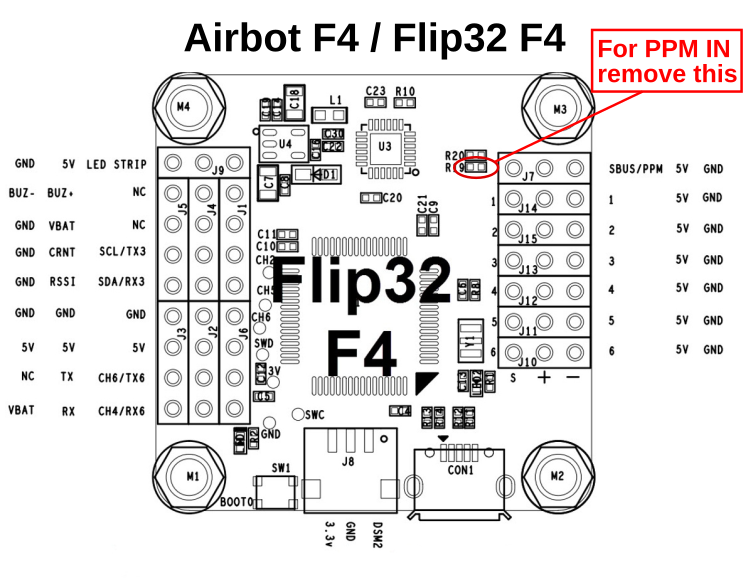
- Airbot F4 (target revomini_airbot)
- Omnibus F4 V2 Pro (target revomini_airbotV2)
How to flash: https://github.com/night-ghost/ardupilot/wiki/Flash-firmware
Once the firmware is flashed the various parameters can be configured using a GCS from the Ardupilot project:
Other then the Ardupilot parameters there are HAL parameters specific for this HAL.
Main differences between Revolution and RevoMini are:
- lack of radio link in the RevoMini (anyway this HAL don't use it)
- Flexi-IO aka RC Input has 10 pin on Revolution and 8 pin on RevoMini
- Ground
- +5V
- NA (PB12, pin 2. Can be used as relay pin)
- NA (PB13, pin 3. Can be used as relay pin)
- PPM/SBUS/DSM Input 1
- PPM/SBUS/DSM Input 2 or Servo7 - see HAL_SERVO_MASK parameter
- UART6 TX (SERIAL3 as Ardupilot Parameter) or Servo8
- UART6 RX or Servo9
- SCL external I2C, Tx SoftSerial if I2C moved to FlexiPort or Servo10
- SDA external I2C, Rx SoftSerial if I2C moved to FlexiPort or Servo11
- Ground
- +5V
- PPM/SBUS/DSM Input 1
- PPM/SBUS/DSM Input 2
- UART6 TX (SERIAL3 as Ardupilot Parameter)
- UART6 RX
- SCL external I2C, Tx SoftSerial if I2C moved to FlexiPort
- SDA external I2C, Rx SoftSerial if I2C moved to FlexiPort
Other info for this board on the Readme file.
Info for this board on the Readme file.