4、微型四轴硬件资源
微型四轴系统框架如图 4.1.1 所示:
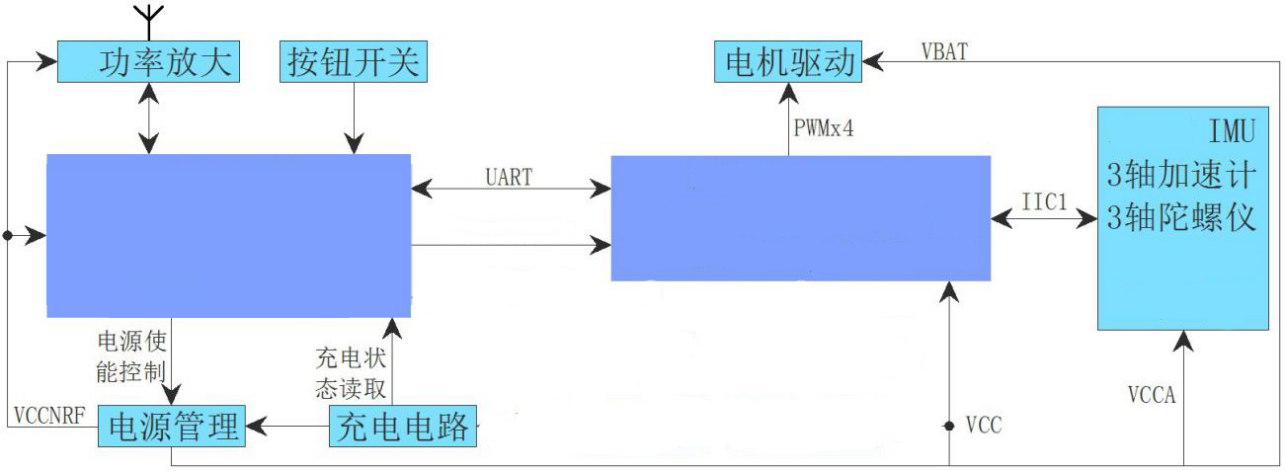
图 4.1.1 系统框架
可以看到,微型四轴采用STM32G030K8T6 MCU 控制,JDY-32蓝牙模块主要负责无线通信,Cortex-M0内核 MCU 主要负责传感器读取,数据融合,PID 控制和电机控制等。而这 2 个模块之间的通信方式为 UART。电路原理详细分析请接着往下看。
主控 MCU STM32G030K8T6 电路图如图 4.2.1 所示:
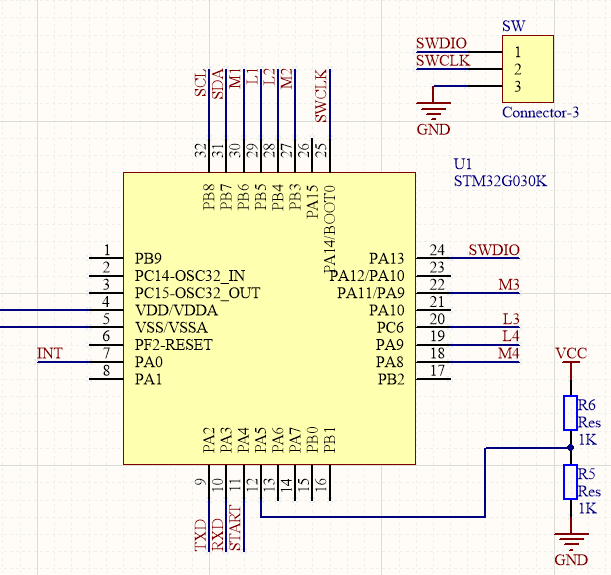
图 4.2.1 主控 MCU
主控 MCU 采用 STM32G030K8T6, 该 32-bit Cortex-M0 内核芯片比较强大,集成 FPU 和 DSP 指令,并具有 64KB FLASH、3 个 16 位定时器、2 个 32 位定时器、2 个 DMA 控制器、5 个 SPI(全双工 I2S)、3 个 IIC、2 个串口、1 个 USB(支持 HOST/SLAVE)、16 通道 12 位 ADC、1 个 RTC(带日历功能)、1 个 SDIO 接口、以及 36 个通用 IO 口等。
主控 MCU 为四轴飞行器的大脑,对飞行器稳定飞行起着至关重要的作用。它同时承担着多种责任,包括:传感器数据读取、数据融合、PID 控制、电机控制、无线通信等。
主控 MCU 通过UART2串口连接了一个蓝牙模块,此模块可以用作微型四轴与上位机通信,也可用于安卓设备控制该四轴。
微型四轴板载一颗六轴传感器 MPU6050 ,电路图如图 4.3.1 所示:
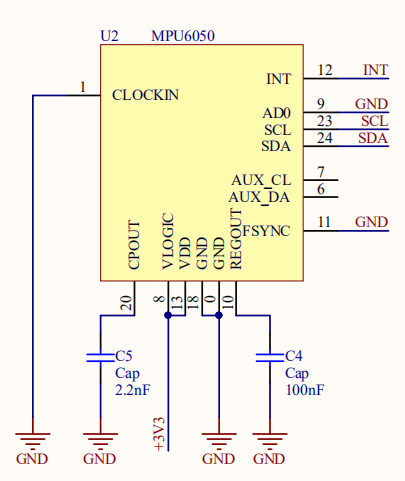
图 4.3.1 MPU6050 六轴传感器
六轴传感器芯片为 MPU6050,该芯片内部集成了 3 轴加速度传感器、3 轴陀螺仪传感器。并且自带 DMP(Digital Motion Processor),支持 MPL。此传感器用于测量四轴的姿态数据。
MPU6050 支持 SPI 和 IIC 通信。为方便开发,这 2 颗传感器我们都使用 IIC 通信,MPU6050 挂接在 MCU 的硬件 IIC1 接口(IMU_SCL:PB8, IMU_SDA:PB7)上,而且我们使用模拟 IIC 的通信方式,因为模拟 IIC 的通信方式已经能满足我们要求。我们可以看到MPU6050 的 IIC 地址为 0xD2。
微型四轴板载四个便携式插拔电机接口,电路图如图 4.4.1 所示:
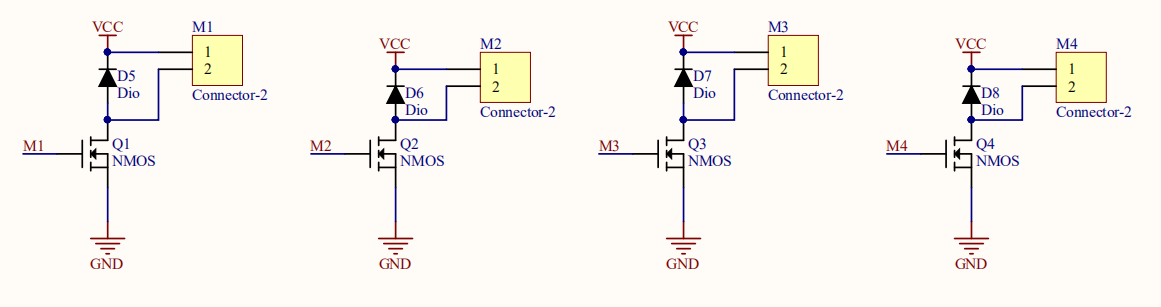
图 4.4.1 电机接口
微型四轴采用微型高速 716 空心杯电机,电机转速高达 45000r/min,能够为飞行器提供充沛的动力。电机采用 NMOS 管 SI2302,3V 门级驱动电压下,导通电阻只有几十毫欧,驱动电流高达 3A,轻松驱动 716 空心杯电机,从而带动飞行器飞行。
微型四轴板载一颗蓝牙无线通信芯片 JDY-32,电路图如图 4.5.1 所示:
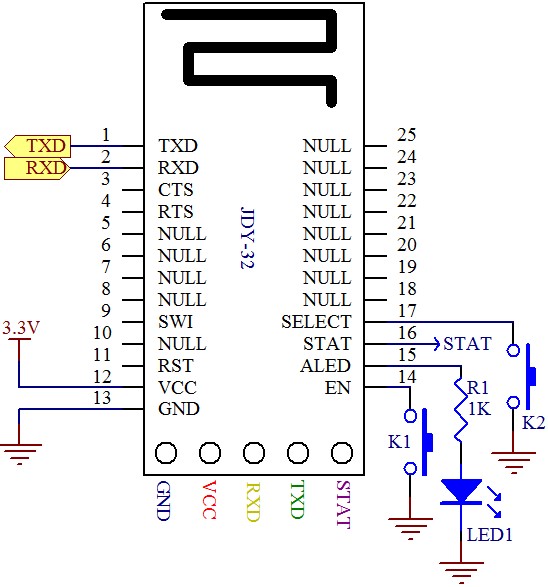
图 4.5.1 蓝牙无线通信芯片 JDY-32
JDY-32双模蓝牙基于蓝牙3.0 SPP + 蓝牙4.2 BLE设计,这样可以支持Windows、Linux、 ios、android数据透传,工作频段2.4GHZ,调制方式GFSK,最大发射功率5db,最大发射距离40米,支持用户通过AT命令修改设备名、波特率等指令,方便快捷使用灵活。JDY-32 支持经典蓝牙与 BLE 协议、可以与支持蓝牙的电脑(台式、笔记本)、手机(android、IOS)通信。
该蓝牙模块通信接口为UART,工作频段为2.4GHz,工作电压为1.8V-3.6V(建议3.3V),采用Bluetooth 4.2 BLE/Bluetooth 3.0 SPP的蓝牙版本。它和主控 MCU 的通信是通过 UART2(NRF_RX:PA2, NRF_TX:PA3, NRF_FLOW_CTRL:PA0)。该模块内置PCB天线,传输距离 <= 40 m,发射功率最大为5db。
该模块的串口指令集如下表所示:
注:JDY-32模块串口发送AT指令务必加上\r\n
| 序列 | 指令 | 功能 | 默认 |
|---|---|---|---|
| 1 | AT+VERSION | 版本号 | JDY-32-V1.0 |
| 2 | AT+RST | 软复位 | |
| 3 | AT+DISC | AT指令断开连接 | |
| 4 | AT+MAC | 查询BLE的MAC地址 | |
| 5 | AT+MACS | 查询SPP的MAC地址 | |
| 6 | AT+BAUD | 波特率 | 9600 |
| 7 | AT+NAME | BLE广播名设置与查询 | JDY-32-LE |
| 8 | AT+NAMES | SPP广播名设置与查询 | JDY-32-SPP |
| 9 | AT+TYPE | SPP密码连接类型 | 2 |
| 10 | AT+PIN | SPP连接密码 | 1234 |
| 11 | AT+DEFAULT | 恢复出厂设置 |
微型四轴板载的电源接口部分,其电路图如图 4.6.1 所示:
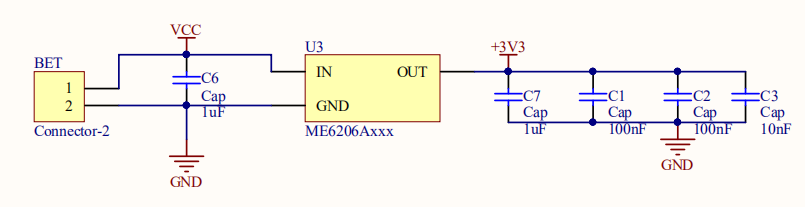
图 4.6.1 电源接口
ME6206A是高纹波抑制率、低功耗、低压差,具有过流和短路保护的CMOS降压型线性稳压器(LDO)。这些器件具有很低的静态偏置电流,它们能在输入、输出电压差极小的情况下提供300mA的输出电流,并且仍能保持良好的调整率。该器件输入电压高达 6.0V,输出 1.5V - 5.0V。因为是线性稳压器,所以输出纹波很小,同时低压差的功能就可以保证输入电压在很低的条件下输出电压也非常稳定。
微型四轴板载 4 颗高亮的绿色 LED ,其电路图如图 4.7.1 所示:
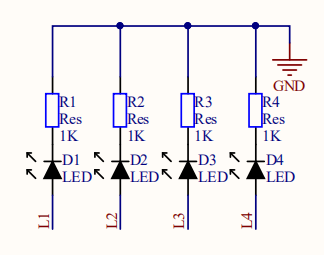
图 4.7.1 LED 接口
微型四轴板载 SWD 仿真及下载接口,电路图如图 4.9.1 所示:
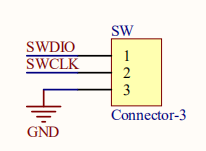
图 4.9.1 SWD 仿真下载接口
微型四轴为客户预留了代码下载和调试接口,方便客户二次开发。该接口支持 STM32 的代码下载和调试。