3、航模常见术语
从结构形式上四轴飞行器可分为十字模式和 X 模式。十字模式如下图 3.1.1 所示,X 模式如下图 3.1.2 所示。对于姿态测量和控制来说,两种结构差别不大。如果考虑安装航拍摄像机,为了视线不被挡住,通常采用 X 模式。
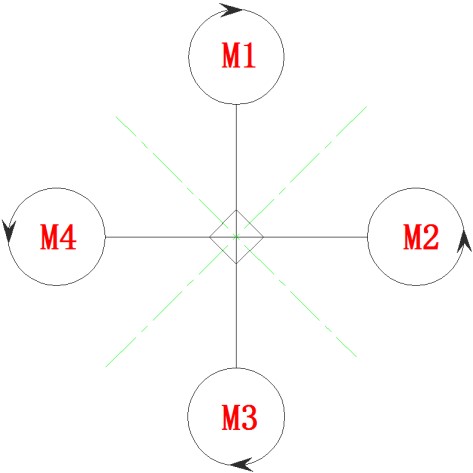
图 3.1.1 十字模式

图 3.1.2 X 模式
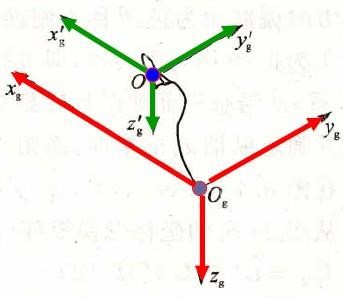
图 3.2.1 地面坐标系
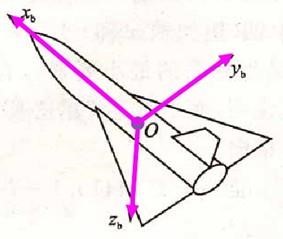
图 3.2.2 机体坐标系
地面坐标系,如图 3.2.1 所示:
-
在地面上选一点 Og;
-
使 Xg 轴在水平面内并指向某一方向;
-
Zg 轴垂直于地面并指向地心;
-
Yg 轴在水平面内垂直于 Xg 轴,其指向按右手定则确定;机体坐标系,如图 3.2.2 所示:
-
原点 O 取在飞机质心处,坐标系与飞机固连;
-
X 轴在飞机对称平面内并平行于飞机的设计轴线指向机头;
-
Y 轴垂直于飞机对称平面指向机身右方;
-
Z 轴在飞机对称平面内,与 X 轴垂直并指向机身下方;
姿态角(pitch、roll、yaw)是飞行器的机体坐标系与地面坐标系的夹角,也叫做欧拉角(Euler Angle)。飞行器在空中任何一种姿态都可以通过姿态角旋转后得到。姿态角的旋转关系图如下图3.2.3 所示。

图 3.2.3 姿态角旋转关系图
俯仰角(pitch):机体坐标系 X 轴与水平面的夹角,围绕 X 轴旋转。当 X 轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负。
偏航角(yaw):机体坐标系 X 轴在水平面上投影与地面坐标系 Xg 轴之间的夹角,围绕 Y 轴旋转。机头右偏航为正,反之为负。
滚转角(roll):机体坐标系 Z 轴与通过机体 Z 轴的铅垂面间的夹角,围绕 Z 轴旋转。
机体向右滚为正,反之为负。
有头模式:飞行器运动的前后左右以自身的坐标系为参考坐标系。当飞行器旋转(航向角改变)后,前进方向始终是机头的方向。
无头模式:飞行器运动的前后左右以地面坐标系为参考坐标系。当飞行器旋转(航向角改变)后,前进方向始终是初始设定的前进方向。