RC ~ DIY builds.md
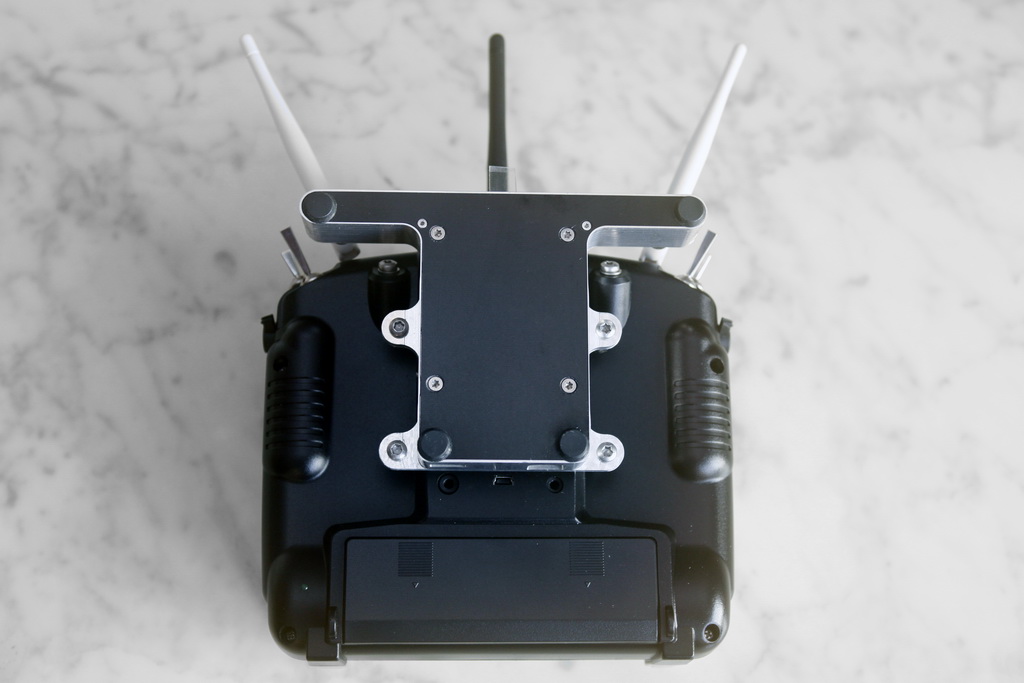
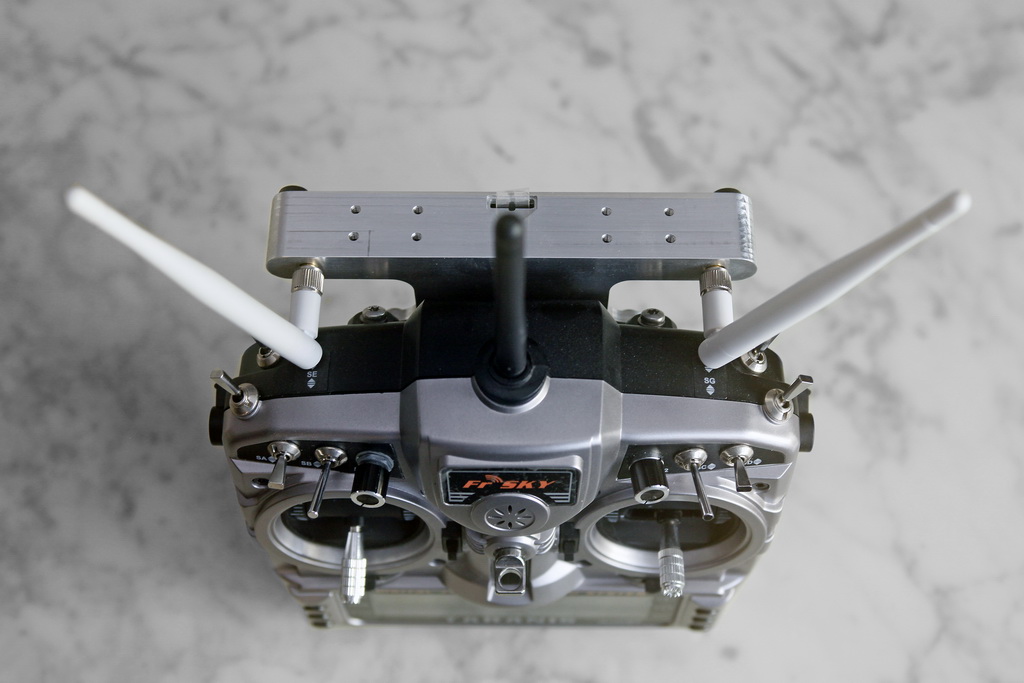
This build was meant as a solution to mount everything that is needed for EZ-WifiBroadcast to the handheld Taranis X9D Transmitter. All hardware is neatly contained in a custom milled aluminum enclose which also acts as a heat sink for the Raspberry's CPU. The system still fits snugly into the Taranis transport case. The stock Taranis battery (NiMh) was replaced with two 25650 LiIon cells. Battery lasts for about 6h non-stop operation.
Pros: compact, robust, no cables, extended battery life
Cons: still external HD-Display / Goggles needed, USB-Port occupied by RPi (no USB-configuration of Taranis anymore),no telemetry on Taranis display (see issue #125)
Hardware used:
- FrSky Taranis X9D
- Raspberry Pi3B
- TP-Link TL-WN722N v1.10 (2x)
- 3A UBEC Module Low Ripple Bluesky Mini Switch-Mode DC BEC 5V 12V 2-6S Supply
- 25650 LiIon Cells (2x)
- lots of small parts (SMA and JST connectors, etc...)
Pictures:







This build was meant to address the Cons of the build above. The idea was to build a dedicated EZ-WifiBroadcast transmitter that would rule all aspects of a modern & sophisticated GCS. Basically it should be an AIO solution that would display the HD-Video right away on an integrated display, show telemetry data in a way the user is used to it and allow for RC-Control over MAVlink. Additionally, it should offer a variety of expansion ports such as HDMI and USB. Also the Micro-SD card should easily be accessible. Furthermore, the new experiences in relation to suitable high power WiFi adapters should be taken into account to allow for mind boggling long range flights. Last but not least ergonomics and clean and stylish design were added to the requirements list.
Hardware used:
- Raspberry Pi3B
- Raspberry Pi 7" Touchscreen Display
- Ubiquiti Networks WifiStation EXT
- TP-Link TL-WN722N (v1.10) (2x)
- GeeekPi Raspberry Pi USB-Joystick controller
- FrSky X9E Replacement Gimbals (2x)
- Logilink UA0139 4 Port USB 2.0-Hub
- MINI DCDC UBEC BEC 2-6s DC 4.5-24V Step Down Module (2x)
- 25650 LiIon Cells (2x)
- 2S Lipo-Battery-Voltage-Indicator
- lots of small parts (SMA and JST connectors, etc...)
Pictures:












Sidenote:
I ran into some problems during the build that i want to share with you:
-
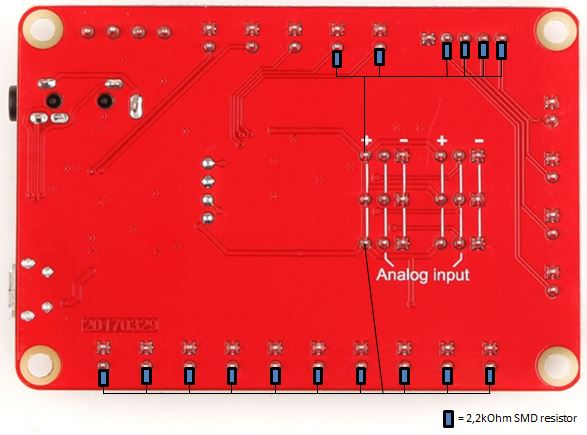
The GeeekPi USB Joystick controller turned out to be very sensitive to RF-interference. While the 6 analogue inputs (AXIS) are protected with pull-down resistors the digital inputs (BUTTONS) are not.
#cheap chinese manufacturing. This caused all sorts of issues because an aweful lot of jitter was introduced into the system. Having a high-power WiFi-adapter nearby did certainly not help either. This issue was solved by adding 2,2kOhm pull-down resistors to each and every digital input as well.
-
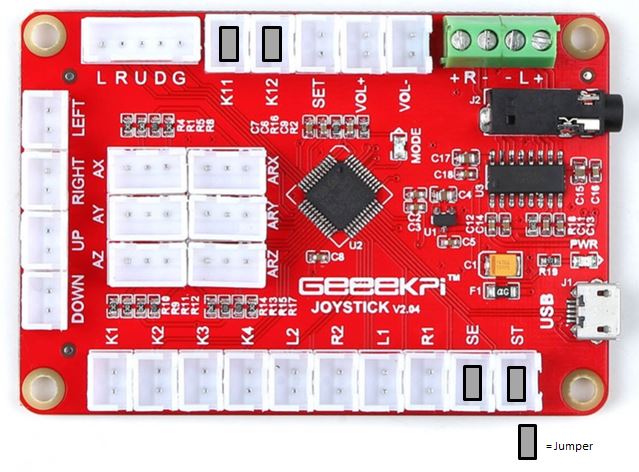
While [1] helped a lot to get rid of the jitter this mitigation somehow did not work for the 4 digital input channels
SESTK11K12. Since I don't use them anyway i deceided to short them out with a jumper on each input. This way I completely got rid of the jitter problem.
-
Additional to the jitter issue I discovered that there was some sort of an interrupt problem that showed up when using the GeeekPi board. The problem would manifest in such a way that the GeeekPi would show a joystick AXIS event even though non of the axis was moved. It would then read a number of empty registers (empty because there was no actual value from its ADCs - because there was no motion). This resulted in extrema values for the affected axis (e.g the Throttle setpoint was 0 but it would suddenly jump to -32676 for a split second). This interupt problem gets worse the more USB devices are added to the GroundPi. You can read more about the issue and how it was mitigated/solved here and here.
With these changes [1-3] the Transmitter is now working perfectly.