-
Notifications
You must be signed in to change notification settings - Fork 1.5k
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Merge pull request #5160 from iNavFlight/development
Release INAV 2.3.0
- Loading branch information
Showing
211 changed files
with
12,978 additions
and
1,159 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,22 +1,23 @@ | ||
| FROM ubuntu:xenial | ||
| LABEL maintainer Andy Schwarz <[email protected]> | ||
| FROM ubuntu:bionic | ||
|
|
||
| # Configuration | ||
| VOLUME /home/src/ | ||
| WORKDIR /home/src/ | ||
| ARG TOOLCHAIN_VERSION_SHORT | ||
| ENV TOOLCHAIN_VERSION_SHORT ${TOOLCHAIN_VERSION_SHORT:-"8-2018q4"} | ||
| ARG TOOLCHAIN_VERSION_LONG | ||
| ENV TOOLCHAIN_VERSION_LONG ${TOOLCHAIN_VERSION_LONG:-"8-2018-q4-major"} | ||
|
|
||
| # Essentials | ||
| RUN mkdir -p /home/src && \ | ||
| apt-get update && \ | ||
| apt-get install -y software-properties-common python-software-properties ruby make git gcc wget curl bzip2 lib32ncurses5 lib32z1 | ||
| apt-get install -y software-properties-common ruby make git gcc wget curl bzip2 | ||
|
|
||
| # Toolchain | ||
| ENV TOOLCHAIN= | ||
| ENV TOOLCHAIN_ID= | ||
| RUN wget -P /tmp https://developer.arm.com/-/media/Files/downloads/gnu-rm/6-2017q2/gcc-arm-none-eabi-6-2017-q2-update-linux.tar.bz2 | ||
| RUN wget -P /tmp "https://developer.arm.com/-/media/Files/downloads/gnu-rm/$TOOLCHAIN_VERSION_SHORT/gcc-arm-none-eabi-$TOOLCHAIN_VERSION_LONG-linux.tar.bz2" | ||
| RUN mkdir -p /opt && \ | ||
| cd /opt && \ | ||
| tar xvjf /tmp/gcc-arm-none-eabi-6-2017-q2-update-linux.tar.bz2 -C /opt && \ | ||
| chmod -R -w /opt/gcc-arm-none-eabi-6-2017-q2-update | ||
| tar xvjf "/tmp/gcc-arm-none-eabi-$TOOLCHAIN_VERSION_LONG-linux.tar.bz2" -C /opt && \ | ||
| chmod -R -w "/opt/gcc-arm-none-eabi-$TOOLCHAIN_VERSION_LONG" | ||
|
|
||
| ENV PATH="/opt/gcc-arm-none-eabi-6-2017-q2-update/bin:${PATH}" | ||
| ENV PATH="/opt/gcc-arm-none-eabi-$TOOLCHAIN_VERSION_LONG/bin:$PATH" |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,2 +1,12 @@ | ||
| echo "Building target" $1 | ||
| docker run --rm -v `pwd`:/home/src/ flyandi/docker-inav make TARGET=$1 | ||
| if [ -z "$1" ]; then | ||
| echo "Usage syntax: ./build.sh <TARGET>" | ||
| exit 1 | ||
| fi | ||
|
|
||
| if [ -z "$(docker images -q inav-build)" ]; then | ||
| echo -e "*** Building image\n" | ||
| docker build -t inav-build . | ||
| fi | ||
|
|
||
| echo -e "*** Building target $1\n" | ||
| docker run --rm -v "$(pwd)":/home/src/ inav-build make TARGET="$1" |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,28 @@ | ||
| # Board - [MATEKSYS F765-Wing](https://inavflight.com/shop/s/bg/1557661) | ||
|
|
||
| 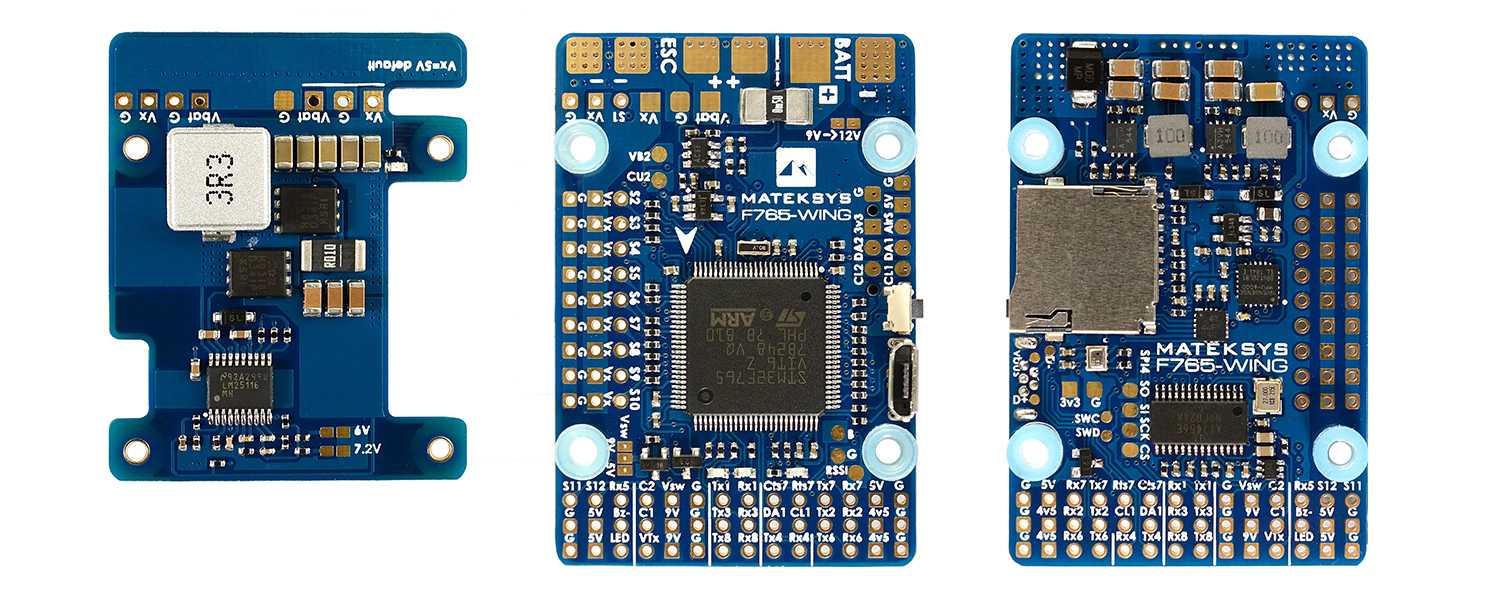 | ||
|
|
||
| ## Specification: | ||
|
|
||
| * STM32F765 216MHz CPU | ||
| * 2-8S LiPo support | ||
| * 132A current sensor | ||
| * OSD | ||
| * BMP280 barometer | ||
| * SD slot | ||
| * 7 UART serial ports | ||
| * 2 I2C | ||
| * PDB for 2 motors | ||
| * 12 outputs (10 DSHOT) | ||
| * 8A BEC for the servos | ||
| * 9V supply for FPV gear | ||
| * Dual camera switcher | ||
|
|
||
| ## Details | ||
|
|
||
| * For Matek F765-WING use `MATEKF765` firmware. | ||
| * No need for SBUS inversion | ||
|
|
||
| ## Where to buy: | ||
|
|
||
| * [Banggood](https://inavflight.com/shop/s/bg/1557661) |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Oops, something went wrong.