3. Software
First you need to install Atom text editor and PlatformIO IDE for Atom.
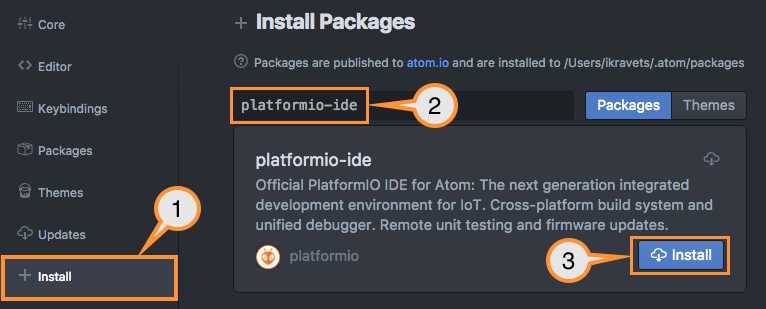
Click Install a Package, then Open Installer button. Search for and install platformio-ide package. Clang is not required if you just want to upload the code.
Please restart Atom after the installation. Now you should see PlatformIO buttons on the left:

PlatformIO automatically detects upload port by default. You can check the connection by clicking Devices button inside PlatformIO Home tab. Try pressing the reset button on the board or use a different cable in case of a problem.
You might need to install CP210x USB to UART Bridge VCP Drivers to use TTGO board.
To download the code, press Alt+G, then = key. In the 'Clone from' field, enter this URL: https://github.com/DroidSector/FireFly-Nano-Remote.git
To download an updated code afterward, press Alt+G, then Shift+F. These commands also available in the menu: Packages > Command Palette, type git.
The default frequency is set at 920 MHz, if your board version is different please edit this file.
Please open include/globals.h file and tweak values according to your board setup (max speed, wheels diameter, etc), as settings menu is not ready yet.
Connect the remote using micro-USB cable to your computer. Click on platformio.ini in the left panel and uncomment the line related to your board, e.g. env_default = Remote.Heltec.v2. Build and upload the code using buttons on the left or PlatformIO menu. You should see these messages:
Uploading .pioenvs/Remote.Heltec.v2/firmware.bin
Erase flash
...
================================== [SUMMARY] ==================================
Environment Remote.Heltec.v2 [SUCCESS]
Environment Receiver.Heltec.v2 [SKIP]
Environment Receiver.TTGO.OLED.v1 [SKIP]
Environment Remote.Feather [SKIP]
Environment Receiver.Feather [SKIP]
========================= [SUCCESS] Took 14.76 seconds =========================
You might need to calibrate the hall sensor. Click the top button on the remote 3 times to display the menu, then go to Remote > Calibrate.
Connect the receiver to your computer. Uncomment the line related to your board, e.g. env_default = Receiver.Heltec.v2. Build and upload the code. The remote will pair automatically if FAKE_UART is defined in the receiver.
Connect the receiver to the VESC. Uncomment #define FAKE_UART line and rebuild and upload the code. Now you should be able to see the real telemetry on the remote.