ROS wrapper for openni 2.2 and NiTE 2.2
Note: openni2_camera supports xtion devices, but not kinects. For using a kinect with ROS, try the freenect stack: http://www.ros.org/wiki/freenect_stack
This package derives from https://github.com/OpenNI/OpenNI2 and includes NiTE 2.2 to perform:
- hand tracking and gesture recognition (waving and clicking)
- person detection and tracking
- skeleton tracking
- OpenNI-Linux-x86-2.2 (version 2.2.0.33)
- NiTE-Linux-x86-2.2 (version 2.2.0.10)
- pal_msgs
- openni2_launch
Right now the following files are alread included so you may skip the following steps:
From OpenNI-Linux-x86-2.2.0.33.tar.zip:
Copy Redist/libOpenNI2.so to openni2_camera/lib
Copy Redist/OpenNI2 to openni2_camera/lib
Copy Include/Linux-x86 to openni2_camera/include/OpenNI-2
Copy Include/Driver to openni2_camera/include/OpenNI-2
Right now the following files are alread included so you may skip the following steps:
From NiTE-Linux-x86-2.2.tar.zip:
Copy libNiTE2.so to openni2_camera/lib
Copy Include/* to openni2_camera/include/NiTE-2
Clone the following repository in your catkin workspace:
git clone [email protected]:pal-robotics/pal_msgs.git
cd pal_msgs
git checkout hydro-devel
Clone the following repository in your catkin workspace:
git clone https://github.com/ros-drivers/openni2_launch.git
cd openni2_launch
git checkout hydro-devel
roslaunch openni2_launch openni2.launch
rosrun image_view image_view image:=/camera/rgb/image_raw
rosrun image_view image_view image:=/camera/depth/image
rostopic echo /camera/gestures
Wave in front of the camera or do the 'click' movement, i.e. point forward and bring back the arm
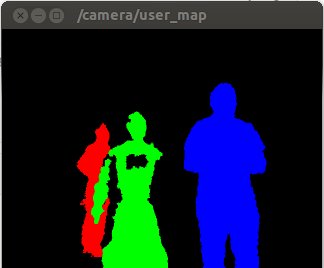
The detected and tracked persons can be visualized in a segmented depth image as follows
rosrun image_view image_view image:=/camera/user_map
The topic /camera/users of type pal_detection_msgs::PersonDetections contain the 3D position of the tracked persons wrt the depth camera frame
rostopic echo /camera/users
---
header:
seq: 675
stamp:
secs: 1401778685
nsecs: 563214248
frame_id: ''
persons:
-
full_body:
x: 0
y: 0
width: 0
height: 0
face:
x: 0
y: 0
width: 0
height: 0
eyesLocated: False
leftEyeX: 0
leftEyeY: 0
rightEyeX: 0
rightEyeY: 0
position:
x: 0.0
y: 0.0
z: 0.0
name: ''
confidence: 0.0
legs:
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: ''
position3D: []
laser_pose:
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: ''
child_frame_id: ''
transform:
translation:
x: 0.0
y: 0.0
z: 0.0
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 0.0
position3D:
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: camera_depth_optical_frame
point:
x: 380.052642822
y: -136.789474487
z: 801.789489746
---
As it can be seen, the useful information appears in the persons.position3D field