
This repository implements teleoperation of the humanoid robot Unitree H1 using Azure Kinect DK camera.
We tested our code on Ubuntu 20.04, other operating systems may be configured differently.
For more information, you can refer to Official Documentation and Azure Kinect DK Code Samples.
The Azure Kinect DK camera driver consists of two parts: camera SDK and body tracking SDK.
Developers can manually download the latest version 1.4.1 SDK installation package from the Microsoft packages website : libk4a1.4_1.4.1_amd64.deb , libk4a1.4-dev_1.4.1_amd64.deb and k4a-tools_1.4.1_amd64.deb。
For convenience, use the wget command to download directly. After the download is complete, proceed with the installation in sequence :
cd ~/Downloads
wget https://packages.microsoft.com/ubuntu/18.04/prod/pool/main/libk/libk4a1.4/libk4a1.4_1.4.1_amd64.deb
wget https://packages.microsoft.com/ubuntu/18.04/prod/pool/main/libk/libk4a1.4-dev/libk4a1.4-dev_1.4.1_amd64.deb
wget https://packages.microsoft.com/ubuntu/18.04/prod/pool/main/k/k4a-tools/k4a-tools_1.4.1_amd64.deb
sudo dpkg -i libk4a1.4_1.4.1_amd64.deb
sudo dpkg -i libk4a1.4-dev_1.4.1_amd64.deb
sudo dpkg -i k4a-tools_1.4.1_amd64.debNote that in order to use the Azure Kinect SDK on the device without needing to be a "root" user, you need to set udev rules. The command is as follows :
cd ~
wget https://github.com/microsoft/Azure-Kinect-Sensor-SDK/raw/develop/scripts/99-k4a.rules
sudo mv ~/99-k4a.rules /etc/udev/rules.d/
# Disconnect and reconnect the Azure Kinect device (if it was connected during this process).After completing the above steps and connecting the camera hardware, use the following command to open the image visualization interface of the Azure Kinect camera :
k4aviewer
The result is shown in the image below :
This example is tested on the Ubuntu 20.04 operating system. Developers can manually download the latest version 1.1.2 installation package from the Microsoft packages website : libk4abt1.1_1.1.2_amd64.deb and libk4abt1.1-dev_1.1.2_amd64.deb 。
If you are using the Ubuntu 18.04 operating system, you can switch to the /ubuntu/18.04/ path to download the corresponding installation package.
For convenience, use the wget command to download directly. After the download is complete, proceed with the installation in sequence :
# Some dependencies that might be needed:
sudo apt-get install libxi-dev
sudo apt-get install libxinerama-dev
sudo apt-get install libxcursor-dev
sudo apt-get install libsoundio1
# Begin the installation of the Body Tracking SDK.
cd ~/Downloads
wget https://packages.microsoft.com/ubuntu/20.04/prod/pool/main/libk/libk4abt1.1/libk4abt1.1_1.1.2_amd64.deb
wget https://packages.microsoft.com/ubuntu/20.04/prod/pool/main/libk/libk4abt1.1-dev/libk4abt1.1-dev_1.1.2_amd64.deb
sudo dpkg -i libk4abt1.1_1.1.2_amd64.deb
sudo dpkg -i libk4abt1.1-dev_1.1.2_amd64.deb
# After completion, you can use the `locate` command to check if the CMake configuration files exist in the path.
locate k4abtConfig.cmake
# The output result of a successful installation is as follows:
/usr/lib/cmake/k4abt/k4abtConfig.cmakeAfter completing the above steps, connect the camera device using the USB 3.0 interface. Use the following command to open the Body Tracking visualization interface of the camera (Note: In the visualization interface, press the h key to display the help information in the command line) :
k4abt_simple_3d_viewer
The result is shown in the image below :

The firmware version information of the Azure Kinect DK camera during this test is as follows:
# Note: You can view the command usage information by directly entering the `AzureKinectFirmwareTool` command.
AzureKinectFirmwareTool -q
# The command output information is shown below:
== Azure Kinect DK Firmware Tool ==
Device Serial Number: 000348604312
Current Firmware Versions:
RGB camera firmware: 1.6.110
Depth camera firmware: 1.6.80
Depth config file: 6109.7
Audio firmware: 1.6.14
Build Config: Production
Certificate Type: MicrosoftIf developers want to update their camera device to the latest firmware version, they can follow these steps :
# Download the latest firmware binary files from this link: https://github.com/microsoft/Azure-Kinect-Sensor-SDK/tree/develop/firmware
cd ~/Downloads
wget https://github.com/microsoft/Azure-Kinect-Sensor-SDK/tree/develop/firmware/AzureKinectDK_Fw_1.6.110080014.bin
# With the device connected, use the `AzureKinectFirmwareTool` command to load the binary files and update the device firmware.
AzureKinectFirmwareTool -u AzureKinectDK_Fw_1.6.110080014.binFor more information, please refer to Update Azure Kinect DK firmware.
The code in this repository is modified from the Azure Kinect DK Code Samples.
This repository uses the Mujoco physics engine for simulation testing, with version 3.1.5.
For convenience, the Mujoco repository files have already been placed in the src/mujoco-3.1.5 directory of this example, so developers do not need to download them manually.
The Unitree H1 XML model file needed for the Mujoco simulation environment has been placed in the src/unitree_h1 directory of this repository.
If developers want to visualize the model file using Mujoco for research purposes, they can proceed with the following command :
# Install the Python version of Mujoco:
pip install mujoco
# Open the Mujoco viewer:
python -m mujoco.viewer After dragging the MJCF model file (src/unitree_h1/mjcf/scene.xml) into the MuJoCo viewer window with your mouse, the result is shown in the image below :
This example uses CMake + ninja to build the project. Therefore, in addition to installing CMake, you also need to install ninja. You can do this by running the following command :
sudo apt-get install build-essential
sudo apt-get install cmake
sudo apt-get install ninja-buildAdditionally, you need to install the Eigen3 library to handle some mathematical computations.
sudo apt install libeigen3-devClone this repository and compile the code :
cd ~
git clone https://github.com/unitreerobotics/kinect_teleoperate.git
cd kinect_teleoperate
mkdir build
cd build
cmake .. -GNinja
# Use ninja to compile the program:
ninjaAfter successful compilation, you can find the generated executable file kinect_teleoperate in the build directory.
Please read the Official Documentation at least once before starting this program.
Start the teleoperation executable program in the kinect_teleoperate/build path :
./kinect_teleoperate
# The following is the output information after the program is executed
Basic Navigation:
Rotate: Rotate the camera by moving the mouse while holding mouse left button
Pan: Translate the scene by holding Ctrl key and drag the scene with mouse left button
Zoom in/out: Move closer/farther away from the scene center by scrolling the mouse scroll wheel
Select Center: Center the scene based on a detected joint by right clicking the joint with mouse
Key Shortcuts
ESC: quit
h: help
b: body visualization mode
k: 3d window layout
control loop start...
MujocoRender loop start...
KinectRender loop start...
Please use the wake-up action to start or stop the TeleOperation...After the program is started, two visualization windows pop up on the desktop, as shown below :
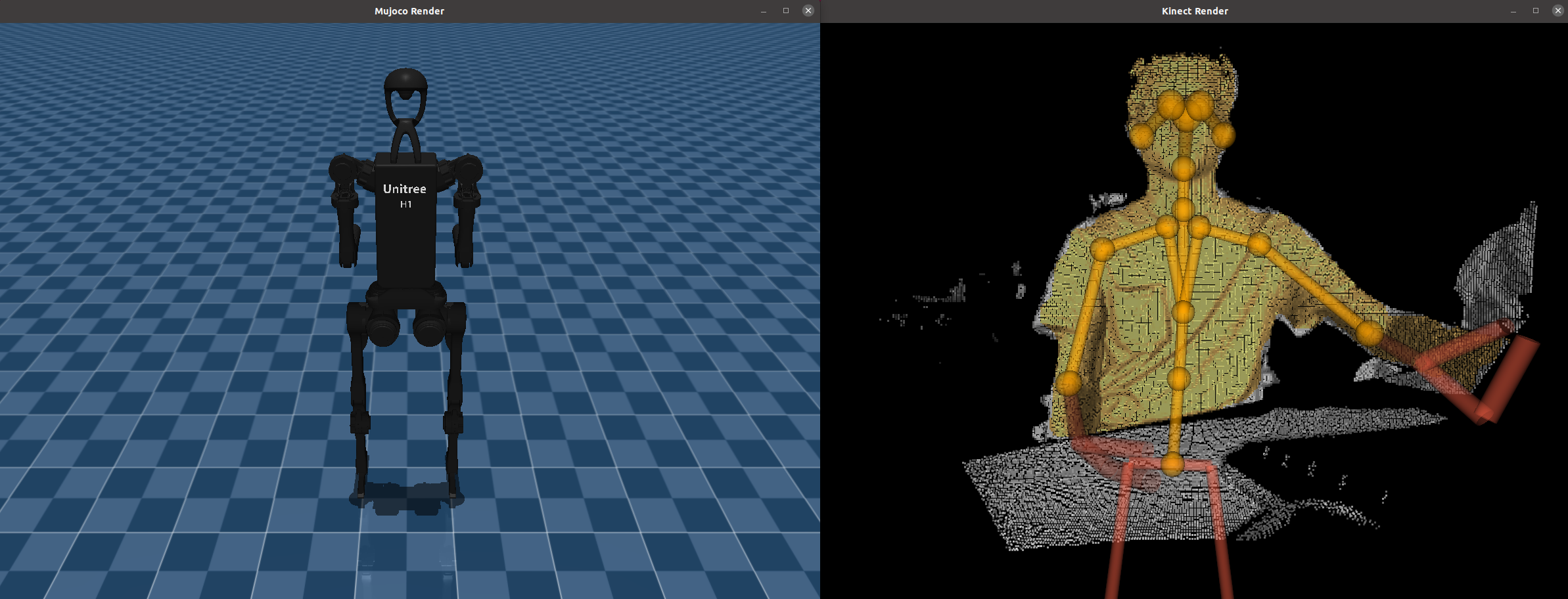
If you execute the teleoperation function immediately without any preparation, it may cause accidents and dangers.
To avoid this, the corresponding wake-up action is required after the program is started to start and stop the teleoperation function.
-
Wake-up action description: The teleoperator stands naturally after facing the Azure Kinect DK camera, with the upper arm hanging naturally, the forearm facing the front and the upper arm at a vertical angle of about 90 degrees. Keep this state for a few seconds to switch the teleoperation start or stop state.
-
Wake-up action diagram:
Please refer to the corresponding section in the Official Documentation.
When the program successfully recognizes the wake-up action and outputs START. in the command line terminal, the function is turned on and teleoperation can be performed at this time.
When the wake-up action is performed again and successfully recognized, the command line terminal outputs END., and the teleoperation function is disabled at this time.
├── CMakeLists.txt [cmake config]
├── lib [Backup of relevant library files]
└── src
├── CMakeLists.txt
├── extern [GLFW and other third-party libraries]
├── kinect_teleoperate_robot
│ ├── CMakeLists.txt
│ ├── include
│ │ ├── jointRetargeting.hpp [used to retarget skeletal joint angles to motor joints]
│ │ ├── math_tool.hpp [filters and quaternion conversion tools]
│ │ └── StartEndPoseDetector.hpp [wake-up action detection code]
│ └── main.cpp [main program code]
├── mujoco-3.1.5 [Mujoco library]
├── sample_helper_includes
├── sample_helper_libs
├── unitree_g1 [Unitree g1 URDF]
└── unitree_h1 [Unitree h1 URDF]