Camera IMU Calibration
An accurate camera-IMU calibration is very important for performance of monocular VIO. This page outlines our process for using XIVO with a brand-new sensor. All provided helper scripts assume that data is collected into a rosbag.
External tools we use are:
-
imu_tk (distributed with XIVO in
thirdparty) - Kalibr
- Allan Variance ROS
The time duration tau will be used in IMU intrinsic calibration.
- Collect several minutes of data where the IMU is not moving.
- For both the gyroscope and accelerometer, compute the Allan variance using many interval lengths using our provided script and find the value above which all Allan variances stop changing. For example (using the Intel RealSense d435i)
python scripts/calibration/allan_plot.py --bag [/path/to/bag] --topic /camera/imu
produces the following Allen plots:
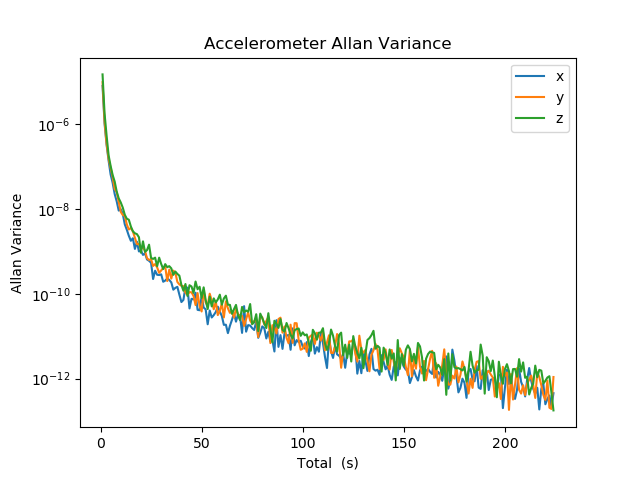
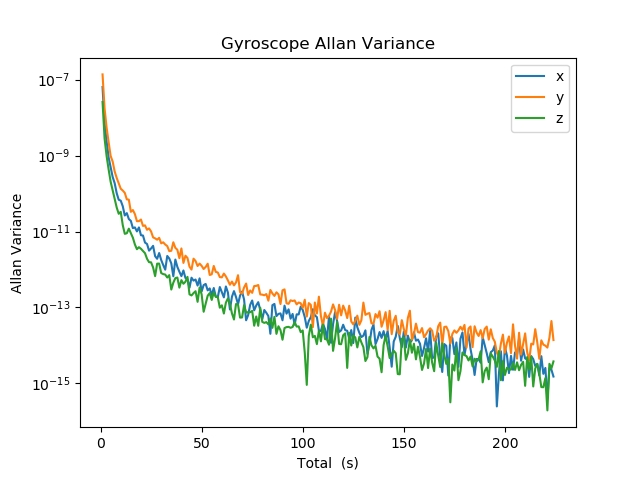
An appropriate value for Tau in both plots is 50 seconds.
XIVO uses the scale-misalignment model given in Tedaldi et al. and implemented in imu_tk. Follow the instructions in the paper to collect a sequence.
- The initial static interval period should be roughly
tauseconds long. - Although only a minimum of 9 short (3-4 second) intervals, each at a different orientation, are required, we recommend collecting 40-50 intervals. This provides more data to imu_tk in case it is not able to perfectly extract 9 perfect intervals.
- Edit imu_tk's sample application
thirdparty/imu_tk/apps/test_imu_calib.cppwith your values oftau, local gravity magnitude, and initial guesses for bias and scale. The sample filetest_imu_calib.cppillustrates a case where raw IMU measurements are not given in typical SI units (e.g. meters, radians). We also provide a sample filethirdparty/imu_tk/apps/phab_calib.cppthat is appropriate for a sensor that outputs measurements in typical SI units. - The script
scripts/calibration/extract_rosbag_for_imutk.pyextracts accelerometer and gyroscope data from a rosbag into the format that imu_tk expects. - imu_tk will output two files containing parameters,
accel.calibandgyro.calibwhich will be used in later steps. - In XIVO's
.cfgfile, put the calibration parameters into theimusection. Set parameterimu_tk_conventiontotrue.
- Collect ~4 hours of IMU data with no motion.
- Extract the rosbag into a folder named
seq_name
python scripts/calibration/bag_to_frames.py --bag [/path/to/bagfile] --cam_topic [topic name] --imu_topic [topic name] --sequence_name [seq_name]
- Correct the IMU measurements of the contents in the folder:
python scripts/correct_imu.py --input [/path/to/seq_name/imu0/data.csv] --output [/path/to/seq_name/imu.csv] --gyro_calib [/path/to/gyro.calib] --accel_calib [/path/to/accel.calib]
- Reassemble the corrected IMU measurements and (untouched) RGB images into a correct rosbag.
rosrun kalibr kalibr_bagcreater --folder /path/to/seq_name --output-bag corrected_bagfile.bag
The topic names in this corrected rosbag will be /cam0/image_raw and /imu.
-
Use Allan Variance ROS to compute noise and drift parameters. (In the input
.yamlfile, put the approximate IMU sample rate (in Hz) for both themeasure_rateandimu_ratefields.) -
Create an input IMU
.yamlfile for Kalibr as described here. Note the warning on the bottom of this page that noise parameters will have to be inflated.
Use Kalibr's camera calibration tool.
- Collect a sufficiently exciting 6-DOF motion sequence in front of a calibration target (an aprilgrid or checkboard).
- Correct the IMU values in the collected rosbag using intrinsics from imu_tk and reassemble. This is the same as steps 2-4 in part 3.
- Calibrate using Kalibr's Camera-IMU Calibration Tool. Since we have already corrected the IMU measurements using the output from imu_tk, the correct imu intrinsic model (
--imu-models) iscalibrated.
The quality of a calibration depends as much on the quality of the input data as it does on the quality of the calibration tools used, if not more. Furthermore, Kalibr's Camera-IMU Extrinsic calibration tool notes that noise values computed from Allan Variances are optimistic and will need to be inflated by 10x or more when using low-cost IMUs. So when do you know you've got the right hyperparameters?
In general,
- Factory numbers (if you can find them) are not the best, but also not terrible. Your calibration numbers should be somewhat near the factory number.
- For each step, if you can get similar output values multiple times (with different data sequences), then all values are approximately correct.
For camera-IMU calibration, sufficiently exciting means that you cover a half-sphere around the calibration target with plenty of rolling, pitching, and yawing.
{kind=link}
{kind=link}