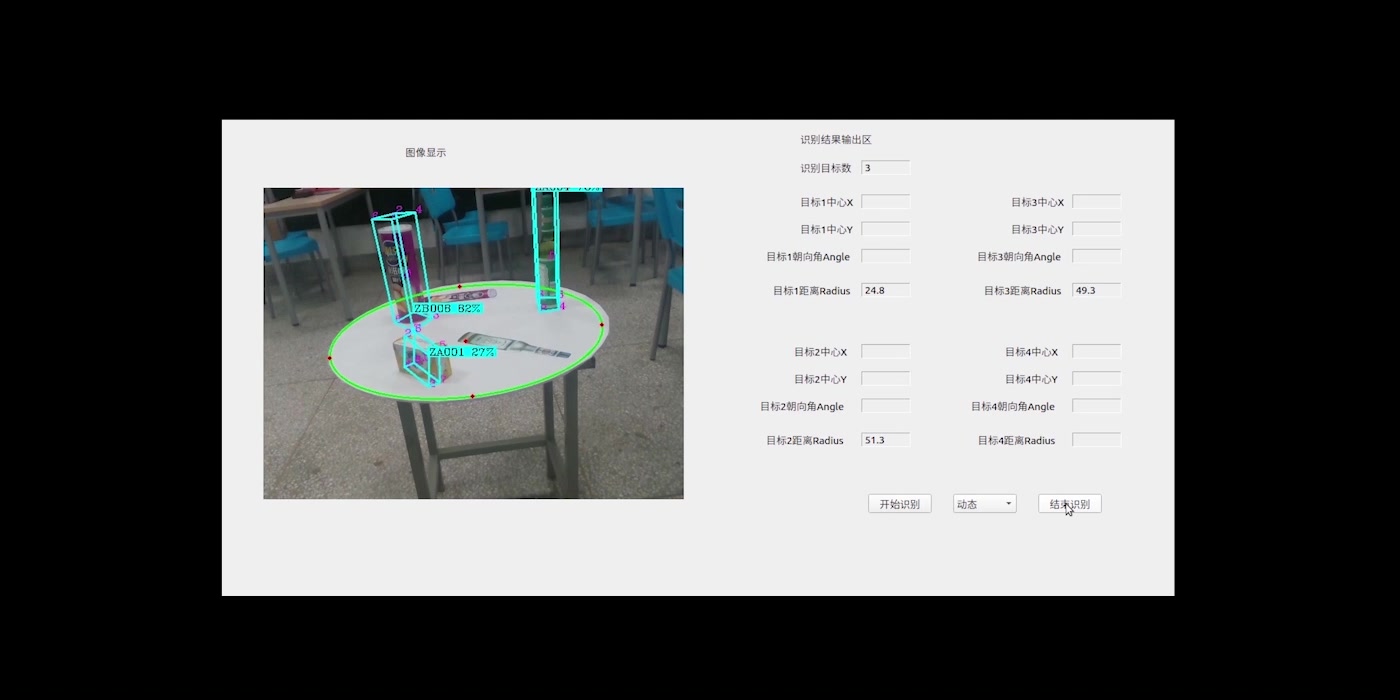
本项目主要实现使用 Realsense SR300相机 对置于静态、动态桌面上的物品进行识别、位姿定位。
以下是参加2019中国机器人大赛先进视觉组时录制的技术报告视频:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
数据集制作工具ObjectDatasetTools
前期选用YOLO6D
使用PyQt完成前端设计
使用librealsense2调用SR300
相机内参:rs-sensor-control 教程
设置参数:rs2_options 教程
QT.py为主文件,实现了整个项目的运作,包含前端显示、调用神经网络、保存文件等。
Predict.py为神经网络接口,被QT.py调用。
MeshPly.py为3D模型接口,被Predict.py调用。
使用时,将LINEMOD文件夹置于本项目根目录