{kind=link}
 LIPSedge™ AE400 is an industrial GigE 3D camera with IP67 protection and powered by Intel® RealSense™ technology and designed for industrial applications, such as robot application, logistic/factory automation, and 3D monitoring/inspection.
LIPSedge™ AE400 is an industrial GigE 3D camera with IP67 protection and powered by Intel® RealSense™ technology and designed for industrial applications, such as robot application, logistic/factory automation, and 3D monitoring/inspection.
| Title | Video |
|---|---|
| AE400 360° Product View and Introduction |  |
| AE400 Point Cloud DEMO (use realsense-viewer) | 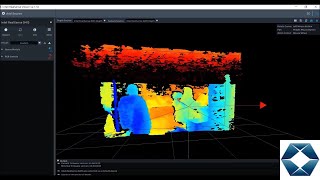 |
- Prepare a Ubuntu 18.04 x64 desktop equipped with a NVIDIA video card that supports CUDA.
- download Isaac SDK to any directory you preferred, e.g. your home directory ~/
- Download latest NVIDIA Isaac SDK from website:
- Install dependencies of desktop/Bazel/NVIDIA GPU Driver according to the following document:
-
https://docs.nvidia.com/isaac/isaac/doc/setup.html#prerequisites
-
Important! Remember to install Ubuntu dependencies by running this script (in SDK).
~/isaac$ engine/build/scripts/install_dependencies.sh
- Download latest NVIDIA Isaac SDK
- Git clone LIPS stereo_ae400 workspace:
$ cd ~/
$ git clone https://github.com/lips-hci/stereo_ae400.git
- Specify path of Isaac SDK in the WORKSPACE file under folder stereo_ae400.
local_repository(
name = "com_nvidia_isaac",
path = "/home/nvidia/isaac", # Here to sepcify your Isaac SDK location, change nvidia by your username
)
- Build application under folder stereo_ae400.
$ cd ~/stereo_ae400
$ bazel build //apps/ae400_camera
- Run app
$ bazel run //apps/ae400_camera
- The branch 'master' now runs AE400 RealSense SDK v1.0.0.2 at host-side, device firmware minimum requirement is V2.1.
- Release Note
- User Guide (Please refer section 'Updating Firmware')
-
The pervious firmware v1.4 works for AE400 SDK 'v0.9.0.7' on ISAAC SDK 2019.x~2020.1
-
If your device is still firmware 1.1, use tag 'sdk-v0.9.0.5' for development.
💡 The branch 'master' now supports latest ISAAC SDK 2020.2 with new features.
- reading depth/color camera intrinisics
- reading IMU 6-axis sensor data
- new app multicam wich can demo both depth and color streaming from 2 (or more) AE400 cameras

AE400 new features for Isaac 2020.1
- support left/right IR cameras
- more config options to control streams (Depth/RGB/IR)
From this version, you can select left and right IR channels to view in Isaac Sight webpage.

previous releases support
-
Switch to tag 'isaac-2019.3' if you are using previous Isaac SDK 2019.3.
-
Switch to tag 'isaac-2019.2' for users who want to stay at Isaac release 2019.2.
- How to switch between Intel and NVIDIA video cards on Ubuntu?
- If you want to install CUDA 10.0 manually, you can refer this one-click-install script.
- IP address setting - Camera side:
The default setting of AE400 camera is 192.168.0.100, however, you can assign new IP address to it via browser.
Input IP as URL http://192.168.0.100 to open AE400 configuration page, log in, write new IP address and save setting

note: Check your product manual to find login account and password, or contact LIPS to get support
- IP address setting - Host side:
Configure the IP address for connecting AE400 by editing the network setting file
$ vi config/network.json
{
"config": {
"ip": "192.168.0.100" <= it should match AE400 camera's IP address
}
}
- Install network setting into your system
$ sudo mkdir -p /usr/etc/LIPS/lib
$ sudo cp config/network.json /usr/etc/LIPS/lib/
note: AE400 software looks for setting in system path /usr/etc/LIPS/lib/network.json. If file is missing, default IP address 192.168.0.100 is applied.
- Launch app by bazel commandline
$ bazel run //apps/ae400_camera
note: make sure the host, AE400 camera, and the remote robot are at same network domain, so they can connect to each other.
- Open a web brower, connect to http://localhost:3000
From left panel, select ae400_camera checkbox to enable depth/color channels for streaming.
Here is a screenshot of Isaac Sight webpage.

You can run the application on remote robot like Jetson Nano or TX2
- To run ae400_camera sample application on the robot first deploy the package with Isaac SDK built-in command.
# deploy.sh --remote_user <username_on_robot>
-p //apps/ae400_camera:ae400_camera-pkg
-d <jetpack44>
-h <robot_ip>
--run [optional]
Where <username_on_robot> is your user name on the robot, and <robot_ip> is the IP address of the robot.
Using the --run (or -r) option causes deploy.sh to automatically run the application on the robot after deployment.
- For example, assume <robot_ip> is 192.168.0.99, the command is
$ cd ~/stereo_ae400
~/stereo_ae400$ ln -s ~/isaac/engine/build/deploy.sh .
~/stereo_ae400$ ./deploy.sh --remote_user lips -p //apps/ae400_camera:ae400_camera-pkg -d jetpack44 -h 192.168.0.99
- Use below commands on your host side:
- make sure you have an SSH key on your desktop machine.
$ ssh-keygen
$ ssh-copy-id <username_on_robot>@<robot_ip>
note: use command ssh-copy-id to save your time typing password when loging in to robot by ssh.
- install network setting to remote robot
$ cd ~/isaac
$ vi config/network.json //optional, re-assign IP address if you want
$ ssh <username_on_robot>@<robot_ip> "sudo mkdir -p /usr/etc/LIPS/lib"
$ scp config/network.json <username_on_robot>@<robot_ip>:/usr/etc/LIPS/lib/
- Login to the robot to run the application
$ ssh <username_on_robot>@<robot_ip>
$ cd ~/deploy/<username_on_host>/ae400_camera-pkg
$ ./apps/ae400_camera/ae400_camera
-
open a web brower, connect to http://<robot_ip>:3000
-
from left panel, select ae400_camera checkbox to enable depth/color channels for streaming.