This repository has code related to da Vinci Research Kit Mixed Reality extension.
Video Examples:
 |
 |
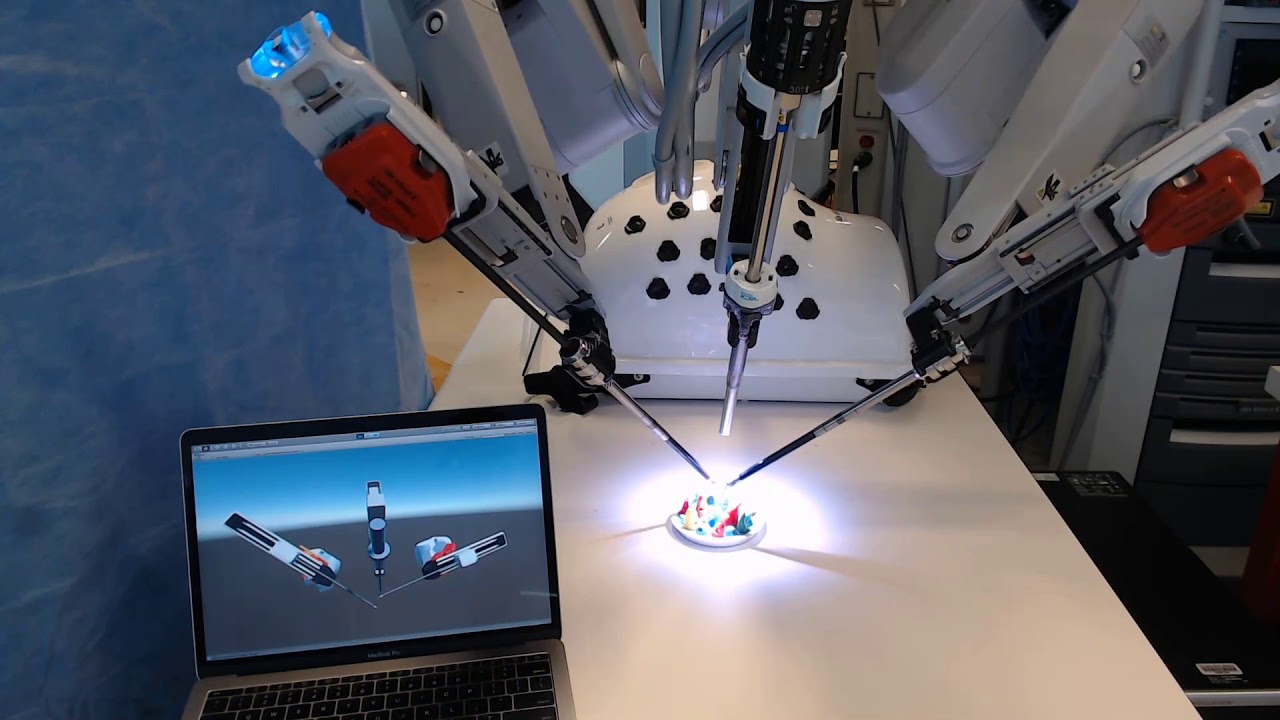
| dVRK-XR in Unity Editor | dVRK-XR on Windows Mixed Reality Headset |
 |
 |
| dVRK-XR with Android ARCore (3rd view) | dVRK-XR with Google Cardboard (screen rec.) |
dVRK-XR facilitates the integration of the da Vinci Research Kit (or da Vinci robot with research API) with extended reality platforms. To run dVRK-XR, you first need some knowledge about Unity development and the dVRK. I also wrote a blog post about the rationale behind the development of this project.
- dvrk_unity:
- A unity project that contains prefabs, models and scripts of PSM, ECM and MTMs of da Vinci robot.
- The virtual robots can be controlled by UDP messages that specify joint values.
- The scene can be adapted and deployed to various mixed reality platforms.
- sample_server:
- A python-based sample server that sends UDP messages to the mixed reality platform.
- Format of the JSON messages, for debugging use
- dVRK hardware
- sawIntuitiveResearchKit 1.7.0 or higher
- sawSocketStreamer
- dvrk-xr running on a mixed reality platform
- Unity Editor, Standalone build (Windows, Ubuntu), HoloLens, or other platforms
- sawIntuitiveResearchKit needs to run with sawSocketStreamer. This can be done via a component configuration file with
-moption, e.g.
# Navigate to share folder
cd sawIntuitiveResearchKit/share
# Run dVRK console with a configuration file for socket streamer.
# This example streams the MTML and MTMR joint states to remote UDP client.
# The client IP address, UDP port number, message rate, message to send, can be specified in the \
# configuration file. Make sure the IP and port match that on the mixed reality platform.
sawIntuitiveResearchKitQtConsoleJSON -j CONSOLE_CONFIG -m socket-streamer/manager-socket-streamer-console.json
- Multiple component configuration files can be attached to the main program, e.g.
# This example streams both the surgeon console and patient-side arms to the remote UDP client
sawIntuitiveResearchKitQtConsoleJSON -j CONSOLE_CONFIG -m socket-streamer/manager-socket-streamer-console.json -m socket-streamer/manager-socket-streamer-patient-cart.json
- Different configuration files can also specify different destinations (IP address), supporting multiple headsets viewing at the virtual robot at the same time.
- da Vinci robot (Classic, S or Si) with research API enabled
- sawIntuitiveDaVinci 1.2.0 or higher
- sawSocketStreamer
- dvrk-xr running on a mixed reality platform
- Unity Editor, Standalone build (Windows, Ubuntu), HoloLens, or other platforms
Same as dVRK, but main program is sawIntuitiveDaVinciConsoleQt.
@inproceedings{qian2019dvrkxr,
title={{dVRK-XR: Mixed Reality Extension for da Vinci Research Kit}},
author={Qian, Long and Deguet, Anton and Kazanzides, Peter},
booktitle={Hamlyn Symposium on Medical Robotics},
year={2019}
}
dvrk-xr was developed with support from NSF NRI 1637789.
JHU CISST Software License