
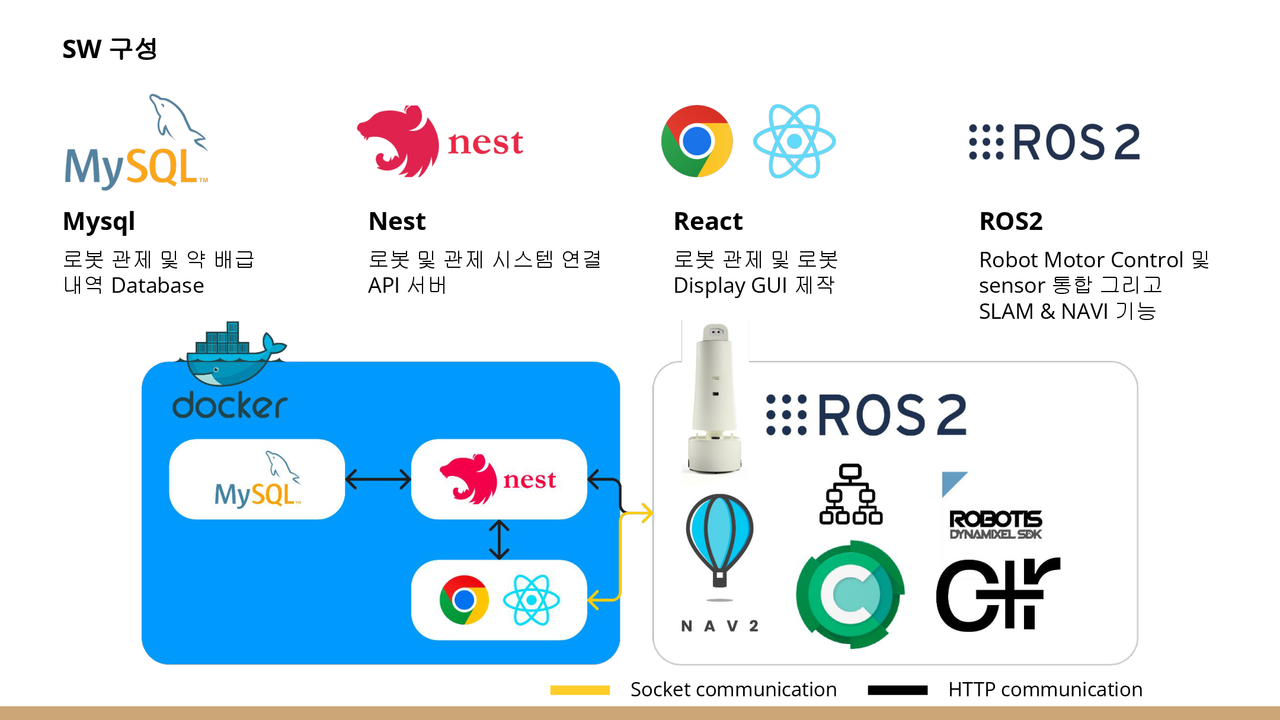
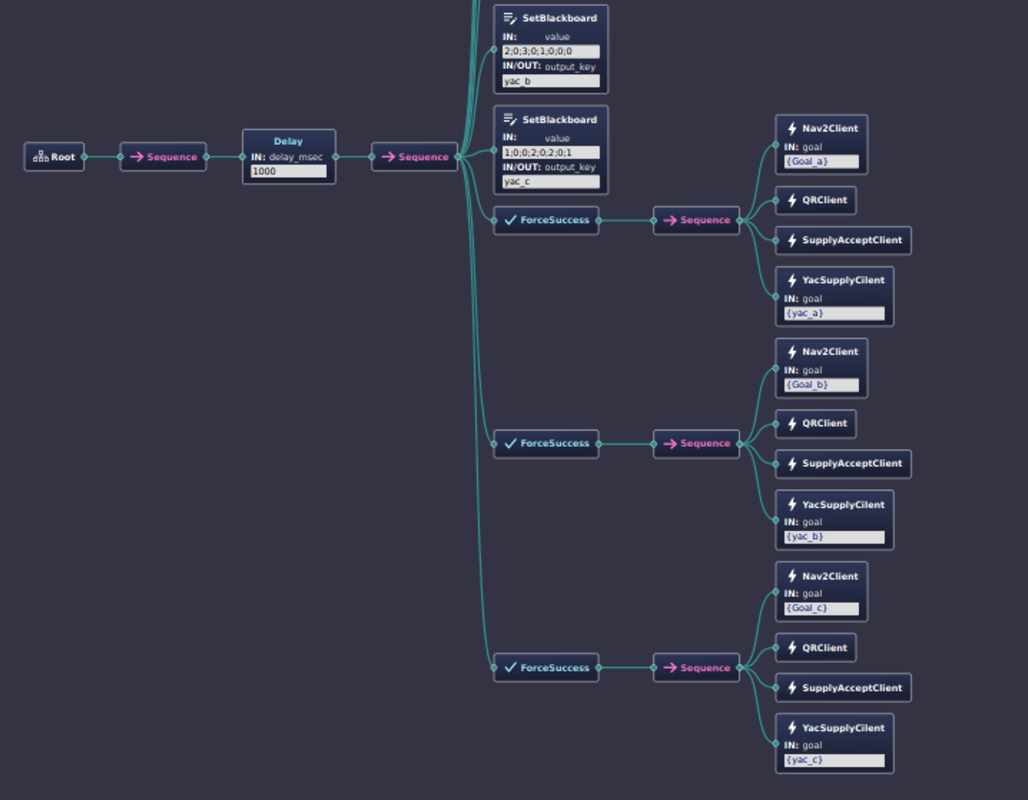
YACYAC, an autonomous robot, effectively executes complex tasks using BehaviorTree algorithms. It reduces the workload of nurses and ensures patient safety, enhancing the efficiency of robotic operations in healthcare environments.

This repository manages dependencies through submodules.
git clone --recursive https://github.com/dawan0111/yacyac.git
sudo apt install libzbar-dev libzmq3-dev ros-${ROS_DISTRO}-rosbridge-server ros-${ROS_DISTRO}-image-transport ros-${ROS_DISTRO}-compressed-image-transport ros-${ROS_DISTRO}-cartographer-ros ros-${ROS_DISTRO}-nav2*cd ~/ros2_ws/src
git clone https://github.com/YDLIDAR/YDLidar-SDK.git
cd YDLidar-SDK/cmake
cmake ..
make
sudo make install
sudo apt-get install python swig
sudo apt-get install python-pip
cd .. && pip install .pip install --upgrade google-cloud-texttospeech
pip install playsoundsudo sh initenv.sh