{kind=link}
Find ArUco markers in digital photos
![]()
This project is maintained by the GeoForAll Lab at the Department of Geodesy and Surveying of the Budapest University of Technology and Economics.
A paper is available about this project in the Baltic Journal of Modern Computing Vol 9. (2021) No.1 Automatic Recognition of ArUco Codes in Land Surveying Tasks.
ArUco markers are black and white square markers which have unique pattern and ID. OpenCV library has a modul to find ArUco markers in images (you should pip install).
pip install opencv-python opencv-contrib-python PIL pil.imagetk numpy matplotlib
Clone the Find-GCP GitHub repo or download the zip file
git clone https://github.com/zsiki/Find-GCP.git
or
wget https://github.com/zsiki/Find-GCP/archive/refs/heads/master.zip
unzip master.zip
You can also download zip using the Code button on the GitHub page of the project.
Before taking the photos the different ArUco markers have to be printed in the suitable size and put on the field. The coordinates of markers have to be measured by GNSS (GPS), total station or other surveyor's method. We prefer the 3x3 or 4x4 ArUco library, the larger the squares in the marker, the smaller the the total marker size can be. You should print markers on gray background to avoid burt in of white on photos. You can use gsd_calc utitility to estimate necessary marker size from the sensor parameters and fligth altitude.
The 3x3 or 4x4 ArUco markers on the image should be minimum 20 x 20 pixels to be detected, the optimal marker size is 30 x 30 pixels. You should plan the marker size depending on the flight altitude and camera parameters. For example 30 x 30 cm markers are enough for a DJI Phantom 4P flying 50 m above the ground.
When you fix your markers on the field please let enough space around the outer black border. For example do not put stones near to the black border of the marker. The software cannot separate them and the marker won't be recognised. The left side marker was not recognised on the following image, because of the two stones at the upper left and right corners. On the right side image the gray spots were removed and recognized.

Figure 1 Non-clear and clear border
This small utility can be used together with photogrammetric programs like Open Drone Map or WebODM to create the necessary Ground Control Point (GCP) file containing image coordinates and projected coordinates of GCPs. It has command line interface (CLI) only. There are several parameters:
usage: gcp_find.py [-h] [-d DICT] [-o OUTPUT] [-t {ODM,VisualSfM}] [-i INPUT]
[-s SEPARATOR] [-v] [--debug | --multi] [-l] [--epsg EPSG]
[-a] [--markersize MARKERSIZE] [--markerstyle MARKERSTYLE]
[--markerstyle1 MARKERSTYLE1] [--edgecolor EDGECOLOR]
[--edgewidth EDGEWIDTH] [--fontsize FONTSIZE]
[--fontcolor FONTCOLOR] [--fontcolor1 FONTCOLOR1]
[--fontweight FONTWEIGHT] [--fontweight1 FONTWEIGHT1]
[--limit LIMIT] [--nez] [-r] [--winmin WINMIN]
[--winmax WINMAX] [--winstep WINSTEP] [--thres THRES]
[--minrate MINRATE] [--maxrate MAXRATE] [--poly POLY]
[--corner CORNER] [--markerdist MARKERDIST]
[--borderdist BORDERDIST] [--borderbits BORDERBITS]
[--otsu OTSU] [--persp PERSP] [--ignore IGNORE]
[--error ERROR] [--correct CORRECT]
[--refinement REFINEMENT] [--refwin REFWIN]
[--maxiter MAXITER] [--minacc MINACC]
[file_names [file_names ...]]
positional arguments:
file_names image files to process
optional arguments:
-h, --help show this help message and exit
-d DICT, --dict DICT marker dictionary id, default=1 (DICT_4X4_100)
-o OUTPUT, --output OUTPUT
name of output GCP list file, default stdout
-t {ODM,VisualSfM}, --type {ODM,VisualSfM}
target program ODM or VisualSfM, default
-i INPUT, --input INPUT
name of input GCP coordinate file, default None
-s SEPARATOR, --separator SEPARATOR
input file separator, default
-v, --verbose verbose output to stdout
--debug show detected markers on image
--multi process images paralel
-l, --list output dictionary names and ids and exit
--epsg EPSG epsg code for gcp coordinates, default None
-a, --adjust adjust colors by built in lookup table
--markersize MARKERSIZE
marker size on debug image, use together with debug
--markerstyle MARKERSTYLE
marker style for point with coordinates, use together
with debug
--markerstyle1 MARKERSTYLE1
marker style for point without coordinates, use
together with debug
--edgecolor EDGECOLOR
marker edge color, use together with debug
--edgewidth EDGEWIDTH
marker edge width, use together with debug
--fontsize FONTSIZE font size on debug image, use together with debug
--fontcolor FONTCOLOR
inner font color on debug image, use together with
debug
--fontcolor1 FONTCOLOR1
outer font color on debug image, use together with
debug
--fontweight FONTWEIGHT
inner font weight on debug image, use together with
debug
--fontweight1 FONTWEIGHT1
outer font weight on debug image, use together with
debug
--limit LIMIT limit the number of records in the output for a unique
id
--nez set the coordinate order in GCP input to
North,East,Elevation (compatible with GCPEditorPro)
-r, --inverted detect inverted markers
--winmin WINMIN adaptive tresholding window min size, default 3
--winmax WINMAX adaptive thresholding window max size, default 23
--winstep WINSTEP adaptive thresholding window size step , default 10
--thres THRES adaptive threshold constant, default 7.0
--minrate MINRATE min marker perimeter rate, default 0.03
--maxrate MAXRATE max marker perimeter rate, default 4.0
--poly POLY polygonal approx accuracy rate, default 0.03
--corner CORNER minimum distance any pair of corners in the same
marker, default 0.05
--markerdist MARKERDIST
minimum distance any pair of corners from different
markers, default 0.05
--borderdist BORDERDIST
minimum distance any marker corner to image border,
default 3
--borderbits BORDERBITS
width of marker border, default 1
--otsu OTSU minimum stddev of pixel values, default 5.0
--persp PERSP number of pixels per cells, default 4
--ignore IGNORE Ignored pixels at cell borders, default 0.13
--error ERROR Border bits error rate, default 0.35
--correct CORRECT Bit correction rate, default 0.6
--refinement REFINEMENT
Subpixel process method, default 0
--refwin REFWIN Window size for subpixel refinement, default 5
--maxiter MAXITER Stop criteria for subpixel process, default 30
--minacc MINACC Stop criteria for subpixel process, default 0.1
List of the available dictionary codes (see --list):
0 : DICT_4X4_50
1 : DICT_4X4_100
2 : DICT_4X4_250
3 : DICT_4X4_1000
4 : DICT_5X5_50
5 : DICT_5X5_100
6 : DICT_5X5_250
7 : DICT_5X5_1000
8 : DICT_6X6_50
9 : DICT_6X6_100
10 : DICT_6X6_250
11 : DICT_6X6_1000
12 : DICT_7X7_50
13 : DICT_7X7_100
14 : DICT_7X7_250
15 : DICT_7X7_1000
16 : DICT_ARUCO_ORIGINAL
17 : DICT_APRILTAG_16H5
17 : DICT_APRILTAG_16h5
18 : DICT_APRILTAG_25H9
18 : DICT_APRILTAG_25h9
19 : DICT_APRILTAG_36H10
19 : DICT_APRILTAG_36h10
20 : DICT_APRILTAG_36H11
20 : DICT_APRILTAG_36h11
99 : DICT_3X3_32 custom
Parameters from winmin to minacc are customizable parameters for ArUco detection and are explaned in the OpenCV Aruco documentation. The two most important parameters are minrate and ignore. Usually the default values of these parameters are not perfect.
minrate defines the minimal size of a marker in a relative way. For example if the larger image size is 5472 pixels and the minrate parameter is 0.01, then the minimal perimeter of an ArUco marker should be 0.01 * 5472 = 54 pixels, and the minimal size of the marker side is 54 / 4 = 13 pixels. Smaller marker candidates are dropped. Our exprerience is the minimal marker side should be 20-30 pixels to detect 4x4 markers. Using the special 3x3 markers (see: dict_gen_3x3.py) the size of the marker can be reduced. So you can calculate marker size in centimetres if you know the pixel size in centimetres, in case of 30-50 metres flight altitude, it is 1-2 cm (DJI Phantom Pro). You should use 20-40 cm large markers.
ignore is also a relative value. It defines the percent of pixels to ignore at the border of the elemens of the marker matrix. In strong sunshine the white areas are burnt on the image. A 0.33 value (33%) is good for burnt images, the green squares on figure below will be used to detect black/white elements. There is an other solution to reduce the burnt effect, use grey paper to print the aruco codes. The second figure below shows the original black/grey marker and the marker on the image. Thanks to the adaptive thresholding in the ArUco module, grey and black can be separated. adjust can also be used to reduce the effect of white burnt in.
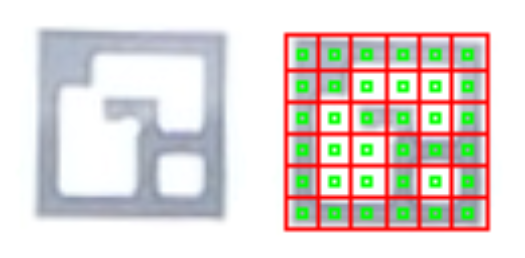
Figure 2 Burnt in effect and the --ignore
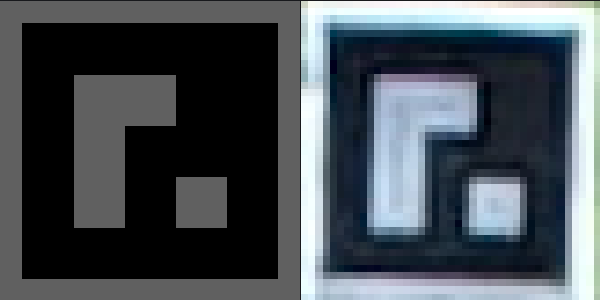
Figure 3 Burnt in effect reduced by black/grey marker. Original marker left, marker on image right.
Sample imput file for GCP coordinates (pointID easting northing elevation):
0 650544.828 237514.298 104.215
1 650552.086 237521.011 104.129
2 650546.305 237521.605 104.217
3 650534.729 237526.552 104.267
4 650542.850 237532.382 104.165
5 650553.513 237514.344 104.169
6 650552.275 237505.909 104.196
See our publication in Baltic Journal of Modern Computing: Automatic Recognition of ArUco Codes in Land Surveying Tasks
There are some small utilities in this repo, too.
This small program lists GPS position from exif information of images to the standard output. You can redirect standard output to a file and load it for example into QGIS as delimited text layer to show image positions.
Usage: ./exif_pos.py image_file(s)
Sample output of the program:
./exif_pos.py *.JPG
DJI_0021.JPG,19.120939,47.683572,203.86
DJI_0022.JPG,19.120958,47.683647,203.86
DJI_0023.JPG,19.120985,47.683718,203.86
DJI_0024.JPG,19.121020,47.683821,203.76
DJI_0025.JPG,19.121042,47.683890,203.76
DJI_0026.JPG,19.121080,47.683997,203.76
DJI_0038.JPG,19.120905,47.684089,203.76
DJI_0039.JPG,19.120872,47.683985,203.76
DJI_0040.JPG,19.120846,47.683917,203.76
DJI_0041.JPG,19.120786,47.683741,203.86
DJI_0042.JPG,19.120762,47.683671,203.86
DJI_0043.JPG,19.120725,47.683566,203.86
It generates 32 custom 3x3 ArUco dictionary markers in dict_3x3 subdirectory (png files). File names are 3x3_id.png, where id is the ordinal number of the marker.
It generates aruco marker images of different standard dictionaries for printing.
usage: aruco_make.py [-h] [-d DICT] [-s START] [-e END] [-v]
optional arguments:
-h, --help show this help message and exit
-d DICT, --dict DICT marker dictionary id (use 99 for 3x3 markers),
default= 1 (DICT_4X4_100)
-s START, --start START
first marker to generate, default= 0
-e END, --end END last marker to generate, default= -1
-v, --view show marker on monitor
-g, --gray generate black/gray marker
--value VALUE shade of background use with --gray, default=95
-p PAD, --pad PAD border width around marker in inches, default= 0.5
You can also use Romain Basile's GCP Aruco Marker Generator to get SVG markers.
gcp_check.py is a GUI application which helps the visual check of the found GCPs by gcp_find.py. It has several command line parameters and a simple menu. The output file of the gcp_find.py is the input file of this program. There are forward and backward buttons to step between images. Mouse wheel can be used to zoom in/out and left button to pan.
usage: gcp_check.py [-h] [--command COMMAND] [--path PATH] [-s SEPARATOR]
[--markersize MARKERSIZE] [--edgecolor EDGECOLOR]
[--edgewidth EDGEWIDTH] [--fontsize FONTSIZE]
[--fontcolor FONTCOLOR]
[file_name]
positional arguments:
file_name GCP file to process
optional arguments:
-h, --help show this help message and exit
--command COMMAND command all/ID show all images/images with GCP ID
--path PATH input path for images
-s SEPARATOR, --separator SEPARATOR
input file separator, default
--markersize MARKERSIZE
marker size on image, default 200
--edgecolor EDGECOLOR
marker edge color, default red
--edgewidth EDGEWIDTH
marker edge width, default 20
--fontsize FONTSIZE font size on image, default 200
--fontcolor FONTCOLOR
font color on image, default red

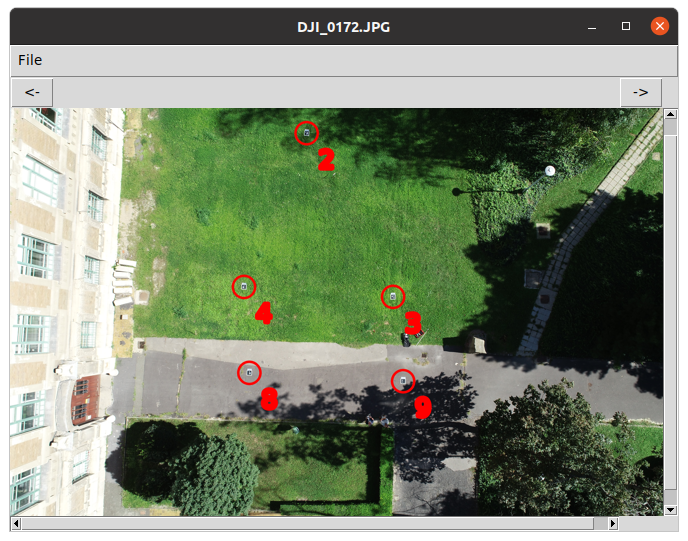
Figure 4 Original image and found GCPs marked
gsd_calc is a simple web application written in JavaScript using jQuery to estimate the Ground Sample Distance (GSD) and the ArUco markes size depending on the sensor data and flight altitude.
There is a small database (realy a JSON file) with the parameters of some cameras. There are three obligatory and two optional parameters in it.
-focal focal length of the camera in mm -iheight image height in pixels (optional) -iwidth image width in pixels -sheight sensor width in mm -swidth sensor height in mm (optional)
It is available on line here.
Images used in the samples are available in the samples directory. Please share with us your samples using gcp_find.
Find ArUco markers in an image and output marker IDs and image coordinates of marker centers.
./gcp_find.py samples/markers.png
16 502 342 markers.png
15 328 342 markers.png
14 152 342 markers.png
13 502 142 markers.png
12 328 142 markers.png
11 152 142 markers.png
We have 3 images made by DJI Phantom 4 Pro. Coordinates of GCPs were measured by GNSS and stored in A3.txt file. The 3x3 ArUco markers were used The next command will generate the necessary text file for ODM.
./gcp_find.py -v -t ODM -i samples/A3.txt --epsg 23700 -o samples/gcp_list.txt --minrate 0.01 --ignore 0.33 -d 99 samples/DJI_017[234].JPG
processing samples/DJI_0172.JPG
5 GCP markers found
processing samples/DJI_0173.JPG
5 GCP markers found
processing samples/DJI_0174.JPG
7 GCP markers found
GCP9: on 3 images ['samples/DJI_0172.JPG', 'samples/DJI_0173.JPG', 'samples/DJI_0174.JPG']
GCP8: on 3 images ['samples/DJI_0172.JPG', 'samples/DJI_0173.JPG', 'samples/DJI_0174.JPG']
GCP3: on 3 images ['samples/DJI_0172.JPG', 'samples/DJI_0173.JPG', 'samples/DJI_0174.JPG']
GCP4: on 3 images ['samples/DJI_0172.JPG', 'samples/DJI_0173.JPG', 'samples/DJI_0174.JPG']
GCP2: on 3 images ['samples/DJI_0172.JPG', 'samples/DJI_0173.JPG', 'samples/DJI_0174.JPG']
GCP1: on 1 images ['samples/DJI_0174.JPG']
GCP0: on 1 images ['samples/DJI_0174.JPG']
The gcp_list.txt output file which is ready for use with ODM or WebODM. Copy the gcp_list.txt into your images directory using ODM and add the
--gcp ./images/gcp_list.txt
switch to your ODM command.
The gcp_list.txt file should look like:
EPSG:2370
650530.705 237530.488 104.066 3206 2391 DJI_0172.JPG 9
650538.926 237536.529 104.113 1952 2323 DJI_0172.JPG 8
650534.729 237526.552 104.267 3124 1703 DJI_0172.JPG 3
650542.850 237532.382 104.165 1908 1622 DJI_0172.JPG 4
650546.305 237521.605 104.217 2419 368 DJI_0172.JPG 2
650530.705 237530.488 104.066 3172 2413 DJI_0173.JPG 9
650538.926 237536.529 104.113 1921 2343 DJI_0173.JPG 8
650534.729 237526.552 104.267 3091 1727 DJI_0173.JPG 3
650542.850 237532.382 104.165 1880 1644 DJI_0173.JPG 4
650546.305 237521.605 104.217 2393 396 DJI_0173.JPG 2
650530.705 237530.488 104.066 3535 2892 DJI_0174.JPG 9
650538.926 237536.529 104.113 2287 2838 DJI_0174.JPG 8
650534.729 237526.552 104.267 3444 2206 DJI_0174.JPG 3
650542.850 237532.382 104.165 2236 2136 DJI_0174.JPG 4
650546.305 237521.605 104.217 2725 879 DJI_0174.JPG 2
650552.086 237521.011 104.129 2239 403 DJI_0174.JPG 1
650544.828 237514.298 104.215 3408 322 DJI_0174.JPG 0
Photos (DJI0087.jpg and DJI0088.jpg) made by a DJI Phantom 4 Pro. There are three 4x4 GCPs (id=3, id=4, id=5) on image DJI_0087.jpg and five (id=0, id=3, id=4, id=5, id=6) on image DJI_0088.jpg.
python3 gcp_find.py --minrate 0.01 samples/bme/DJI_008[78].jpg
5 2832 1845 DJI_0087.jpg
3 2472 731 DJI_0087.jpg
5 3024 3556 DJI_0088.jpg
3 2654 2458 DJI_0088.jpg
0 2448 1315 DJI_0088.jpg
6 3094 1299 DJI_0088.jpg
Marker 4 was not detected.
Photos (DJI_0180.jpg and DJI_0181.jpg) made by DJI Phantom 4 Pro, flying alttitude 50 m. There are eight 3x3 black/grey GCPs on image DJI_0180.png and ten on DJI_0181.png.
python3 gcp_find.py -d 99 --minrate 0.01 --ignore 0.33 samples/bme/DJI_018[01].jpg
3 3458 3251 DJI_0180.jpg
4 2700 3229 DJI_0180.jpg
2 2981 2414 DJI_0180.jpg
1 2663 2114 DJI_0180.jpg
7 2644 1038 DJI_0180.jpg
0 3401 2042 DJI_0180.jpg
5 2879 1655 DJI_0180.jpg
6 3328 1214 DJI_0180.jpg
9 3671 2746 DJI_0181.jpg
8 2897 2733 DJI_0181.jpg
3 3602 2322 DJI_0181.jpg
4 2850 2299 DJI_0181.jpg
2 3128 1502 DJI_0181.jpg
1 2812 1207 DJI_0181.jpg
0 3545 1138 DJI_0181.jpg
7 2792 152 DJI_0181.jpg
5 3026 758 DJI_0181.jpg
6 3471 327 DJI_0181.jpg
All markers found.