Electrical Design
This page contains information about the quadcopter capes designed for our Beaglebone quadcopter. Design files for these are available here.
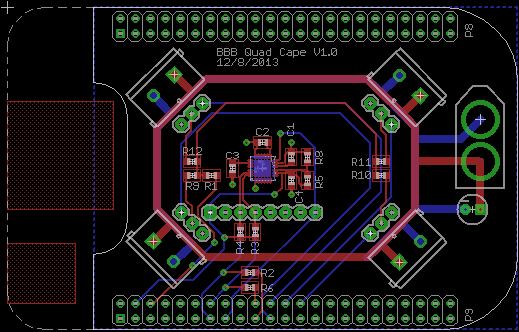
The version 1.0 board served as a test platform to ensure that we could spin the motors and get data from the IMU (without having to physically solder on an MPU-6050). Additionally, it was used to verify the mechanical design, and get a general idea about the weight of the quadcopter when fully created.
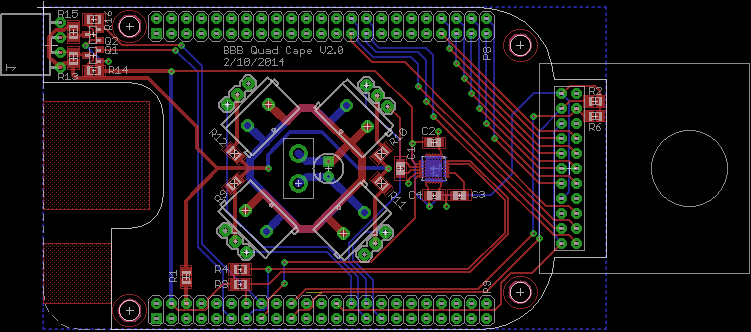
The version 2.0 board changed the form factor slightly due to the addition of a camera and an ultrasonic sensor. Additionally it flips the direction of the MPU-6050 changing the direction of "forward."
Version 3.0 incorporated a barometer (BMP 180) and GPS. It also moved the TRIG and ECHO pins from PRU 0 to PRU 1.
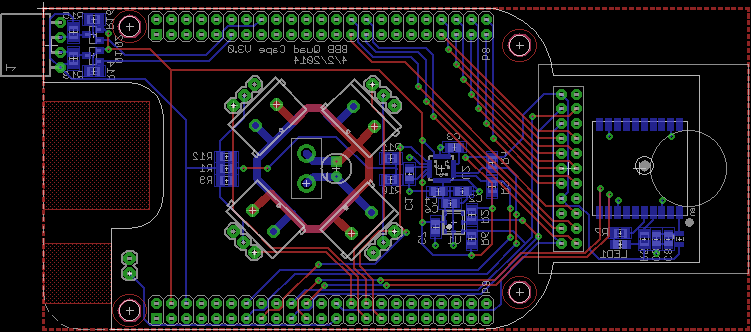
Version 3.1 incorporated minor fixes to 3.0 wiring (moved the GPS so it wouldn't hit the USB dongle).
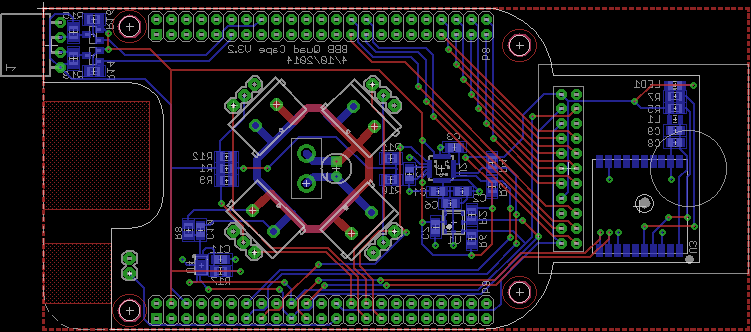
Version 3.2 added a battery gas gauge (MAX 17044) to check battery voltage and estimate flight time.
| Version | Date | Description |
|---|---|---|
| 1.0 | 10/xx/2013 | Initial Design |
| 2.0 | 2/xx/2014 | Added Camera and Ping Sensor |
| 3.0 | 4/2/2014 | MPU-9150, Barometer, GPS |
| 3.1 | 4/9/2014 | Moved GPS out of the way of the USB port |
| 3.2 | 4/10/2014 | Added MAX 17044 LiPo Gas Gauge |