 |
 |
Maintainer: Sebastian Pütz
Author: Sebastian Pütz
Please use the official released ros package or install more recent versions from source.
sudo apt install ros-melodic-pluto-robot
Installation from source
All dependencies can be installed using rosdep
rosdep install pluto_robot
As explicit dependencies for navigation we refer to the following ROS packages, which are also developed by us:
This pluto_robot software stack provides software to use the outdoor robot in simulation and in the real world. Furthermore, example HDF5 map datasets are provided to use Pluto with the mesh_navigation software stack. This package has been used to evaluate the mesh navigation stack. Thus, a couple of experiments are provided. Additionally mesh navigation path planning and motion control with Pluto can be run in the provided Gazebo simulation.
This https://github.com/uos/pluto_robot software stack contains the following packages:
pluto_bringupcontains a couple of launch and config files to start up the robot with its sensors and drivers.pluto_descriptioncontains the Unified Robot Description Format (URDF) model to model the robot and its internal transformationspluto_gazebocontains the Gezebo simulation worlds, configurations and launch files to start up the respective environments with Pluto, see Simulationpluto_navigationcontains dataset, map and navigation configurations to run the mesh navigation stack with Pluto Additionally, it contains mesh navigation experiments using developed planners from the mesh navigation stack. See Mesh Navigation for more details.pluto_robotsis the corresponding meta package.
You can use Pluto in an outdoor simulation environment. We provides several datasets and the corresponding environments for the Gazebo simulation. For navigation purposes the corresponding navigation launch file should be started, too. The following simulation environments are currently available:
- Botanical Garden at Osnabrück University:
roslaunch pluto_gazebo pluto_botanical_garden.launch - Stone Quarry in the Forest in Brockum:
roslaunch pluto_gazebo pluto_stone_quarry.launch - Physics building at Osnabrück University:
roslaunch pluto_gazebo pluto_physics.launch
The mesh_navigation stack provides a navigation server for Move Base Flex. It provides a couple of configuration files and launch files to start the navigation server with the configured layer plugins for the layered mesh map, and the configured planners and controller to perform path planning and motion control in 3D (or more specifically on 2D-manifold).
See the Demo Video:
We provide experiments consisting of starting positions and goals to test the navigation. To run an experiment you first need to launch the navigation stack with the chosen Environment Dataset and then publish the experiments poses:
roslaunch pluto_navigation experiment.launch experiment:={experiment_name}Replace {experiment_name} with the name of the experiment you choose.
Available experiments for each dataset can be found in the Environment Dataset Section in the description of the correspoiding dataset.
To manage our datasets we use a git extension called "Git Large File Storage" or for short git LFS. This allows us to keep this repository small while also embedding our datasets inside this repository.
To download our datasets you first need to install git LFS on your system. After installing the git extension you will be able to clone this repository like any other git repository and the datasets will be downloaded.
If you already cloned this repository without having git LFS installed, the dataset files will just be placeholders on your local copy. To download the datasets you again need to install git LFS on your system. After installing the Extension you need to install the git LFS configuration locally. This needs to be ran just once per system and repository inside the directory of your local copy of this repository.
git lfs install
Now simply fetch all available git LFS resources for your local copy of this repository. This will download all datasets and make them available locally.
git lfs fetch --all
The following environment dataset are available:
- Botanical Garden at Osnabrück University:
roslaunch pluto_navigation botanical_garden_osnabrueck.launch - Stone Quarry in the forest in Brockum:
roslaunch pluto_navigation stone_quarry_brockum.launch - Physics building at Campus Westerberg, Osnabrück University:
roslaunch pluto_navigation physics_campus_westerberg.launch - Farmer's Pit in Stemwede:
roslaunch pluto_navigation farmers_pit_stemwede.launch - Market Garden (complete) in Ibbenbüren:
roslaunch pluto_navigation market_garden_ibbenbueren_all.launch - Market Garden (beds) in Ibbenbüren:
roslaunch pluto_navigation market_garden_ibbenbueren_inner.launch
| Dataset | # Vertices | # Triangles | BB x[m] | BB y[m] | BB z[m] | Overview |
|---|---|---|---|---|---|---|
| Botanical Garden Osnabrück | 714 760 | 1 430 188 | 39.05 | 49.25 | 6.67 |  |
| Stone Quarry Brockum | 992 879 | 1 904 178 | 100.58 | 100.58 | 23.94 |  |
| Physics Campus Westerberg | 719 080 | 1 617 772 | 166.02 | 83.61 | 26.33 |  |
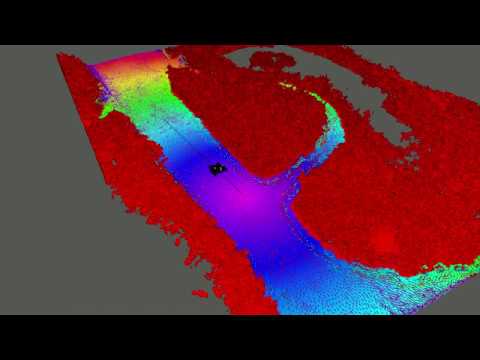
| Farmer's Pit Stemwede | 401 036 | 794 509 | 122.23 | 104.57 | 14.84 |  |
| Market Garden Ibbenbüren All | 1 361 308 | 2 656 283 | 174.33 | 149.61 | 24.58 |  |
in progress, description coming soon.
The following experiments are available for the physics campus dataset. For every experiment there is one option to use the dijkstra planner and one option to use the vector field planner (vfp). To run the experiment, follow the instructions from Experiments.
| Name | Description | Overview |
|---|---|---|
| botanical_garden_1_vfp or botanical_garden_1_dijkstra |
 |
|
| botanical_garden_2_vfp or botanical_garden_2_dijkstra |
 |
|
| botanical_garden_3_vfp or botanical_garden_3_dijkstra |
 |
|
| botanical_garden_4_vfp or botanical_garden_4_dijkstra |
 |
in progress, description coming soon.
The following experiments are available for the physics campus dataset. For every experiment there is one option to use the dijkstra planner and one option to use the vector field planner (vfp). To run the experiment, follow the instructions from Experiments.
| Name | Description | Overview |
|---|---|---|
| stone_quarry__1_vfp or stone_quarry_1_dijkstra |
 |
|
| stone_quarry_2_vfp or stone_quarry_2_dijkstra |
 |
|
| stone_quarry_3_vfp or stone_quarry_3_dijkstra |
 |
|
| stone_quarry_4_vfp or stone_quarry_4_dijkstra |
 |
in progress, description coming soon.
The following experiments are available for the physics campus dataset. For every experiment there is one option to use the dijkstra planner and one option to use the vector field planner (vfp). To run the experiment, follow the instructions from Experiments.
| Name | Description | Overview |
|---|---|---|
| phyics_campus_1_vfp or physics_campus_1_dijkstra |
Plan from the entrance of the building through the tunnel to the parking lot below |  |
| phyics_campus_2_vfp or physics_campus_2_dijkstra |
Like physics_campus_1, but with another goal which results in the shortest path not passing the tunnel |  |
| phyics_campus_3_vfp or physics_campus_3_dijkstra |
Uses the same starting position as the first examples but the goal is not at the bottom parking lot |  |
in progress, description coming soon.
The following experiments are available for the physics campus dataset. For every experiment there is one option to use the dijkstra planner and one option to use the vector field planner (vfp). To run the experiment, follow the instructions from Experiments.
| Name | Description | Overview |
|---|---|---|
| farmers_pit_1_vfp or farmers_pit_1_dijkstra |
 |
|
| farmers_pit_2_vfp or farmers_pit_2_dijkstra |
 |
|
| farmers_pit_3_vfp or farmers_pit_3_dijkstra |
 |
|
| farmers_pit_4_vfp or farmers_pit_4_dijkstra |
 |
in progress, description coming soon.
The following experiments are available for the physics campus dataset. For every experiment there is one option to use the dijkstra planner and one option to use the vector field planner (vfp). To run the experiment, follow the instructions from Experiments.
| Name | Description | Overview |
|---|---|---|
| market_garden_inner_1_vfp or market_garden_inner_1_dijkstra |
 |