This is the code and courseware code for the hands on Lets Code Blacksburg Collision Bot arduino Robotics Workshop. It consist of a three hour, hands-on build & code worksop (build-doc), or, after building the bot, a shorter more intro level Martian Laser-Bot navigation activity.
First, the collision-bot (aka "Laser Bot") workshop build document steps you through the building of a a foam board, arduino based collision-avoidance, autonomous rover. See PDF instructions and code below. The collision-bot workshop build and coding takes around three hours and you can buy all the parts from Amazon or AliExpress.com for around $40. This is straigh up C++ programming best for high school age kids, and so some level of basic C++ or Java coding is recommended before attemptig this lab.
After you've built the laser-bot or have a few bots on hand, there is this more basic, shorter-duration (20min), simple hands on "Martian Laser-Bot Mission" activity that is both a lot of fun, as well as geared much more to the beginner coder (e.g. forward(10), turnR(90), fireLaser(3)). Good for younger kids grades 5-8.
TEACHERS: If you build 3-4 collision-bots (with lasers) ahead of time, you can use them along with the Martian laser-bot activity to introduce kids to very simple, intro level robotics programming (via arduino IDE in C++). Then after their hooked, move them on to the full 3 hour, hands on Collision-Bot workshop (below) where they can build and take home their own laser-bot.
To get started on the hands on, three hour workshop to build and code your collision-bots from scratch..
-
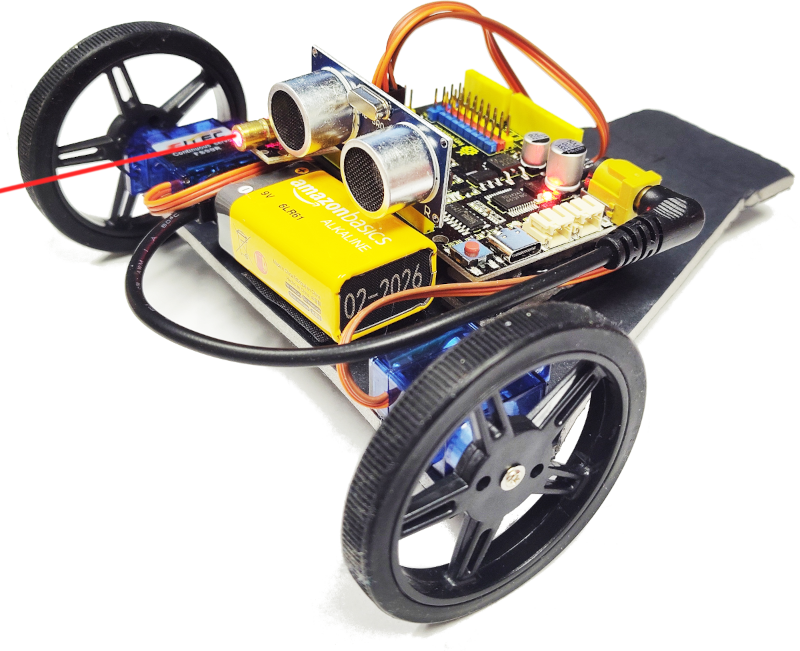
Download the collision bot workshop build doc PDF to build and code the bot. Required parts are a 5"x6" foam board, 2 milk jug caps (if you got the servos without the wheels), 1 soda cap (dragger), arduino, two continuous servos and a US-100 ping sensor, optional 5mW laser and hot glue.)
-
Download and run the 2_blink test code and verify your arduino hardware and software are working
-
Next, download 3_ping_US-100_and_laser.ino.. build/upload and THEN hook up the US-100 ping sensor (do not connect ping sensor until you have uploaded/run the code!)
-
Download the 4_two-servos-test.ino code, tune the stopL, stopR values solid stopAll() functionality (and optionally forwardL, forwardR values to ensure your bot goes in a straight line).
-
Completing the bot's code:
- 5a For experienced coders, combine ping and sevo code to make autonomous bot
- 5b For inexperienced coders, download the 5b_collision-bot_complete.ino code and tune your stopL and stopR values
- 5c For doing the "Mission to Mars" mission PDF, and download 5c_Laser_Bot_Mission_to_Mars.ino code to begin programming your bot movements on Mars! (but you'll have to find, fix and upload the laser cannon first!)
For a stretch goal, have your more advanced students employ the getDist() function in 5c_Laser_Bot_Mission_to_Mars.ino code to detect objects in the bot's path to make your very own autonomous collision-avoiding robot, or even shoot things with the laser that get in the path of your robot!
- Arduino (brain, 1x) - https://www.amazon.com/dp/B085RHTBJT/ ($15)
- Ultrasonic US-100 (eyes, 1x) - https://www.amazon.com/dp/B098R34Y12 ($8)
- KY-008 Laser - https://www.amazon.com/dp/B07R45F1KY ($5)
- Servos (x2) - https://www.robotshop.com/en/9g-continuous-rotation-micro-servo.html ($10)
- optional Servos (x2) w/Big Wheels - https://www.amazon.com/dp/B086ZGTLZB/ ($15 optional)
- 9V Battery Case - https://amazon.com/dp/B07T83B4SW/ ($3)
- 9V Battery (~$2)
The Laser-Bot Mission to Mars coding activity uses the previously built collision-bot (w/5000 µWatt laser cannon). The Martian Laser-Bot mission is a much less intensive, more intro level coding activity. In this shorter (20 minute) intro level hands on coding activity, each student is tasked with programming their already built, code-complete laser-bot rover to navigate the mountainous Martian terrain, find the alien armada, and take them out with their laser cannon before they launch their attack on Earth! See activity photos and video here : All LCBB code and related materials are copy left (open sourced) under the Creative Commons (CC)(BY)(SA)[1] License.
[1] - https://en.wikipedia.org/wiki/Creative_Commons_license#Types_of_licenses