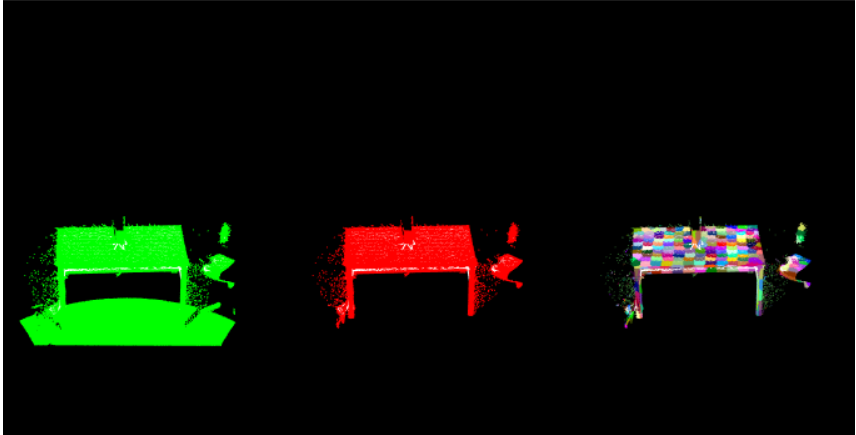
(一)利用==RANSAC算法==将桌子的背景提取(即地面分割)
(二)对地面分割后的桌子进行==超体素分割==
从原始点云中随机选取几个点构成平面,当点云距离平面较近时加入这个平面,不断迭代,最终所得平面点的个数达到一定数量即平面拟合完成
注意参数:
==codfficients 模型参数==
==inliers 内点索引==

==pcl::SupervoxelClustering==实现的方法是VCCS(Voxel Cloud Connectivity Segmentation)方法,它属于一种超像素方法,该方法可以产生3D点云数据的像素级分割,获得的分割结果被称为超体素。在处理物体边界方面,超体素要优于现有的基于二维图像的方法。同时,该方法保持较高的效率,利用空间==八叉树==结构,VCCS使用==k-均值聚类的区域增长==来直接对点云机型超体素分割。
得到的超体素有两个重要特性:
第一,在3D空间内,均匀分布,该特性,通过在点云空间中均匀设定种子达到
第二,除非体素空间上是相连的,否则超体素不能跨越边界。利用八叉树结构,可以判断叶节点是否相邻。在体素化的3D空间内,超体素保持相邻关系,是指这些体素之间,分享共用的面、边和顶点
#include <iostream>
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/segmentation/supervoxel_clustering.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/extract_indices.h>
#include <boost/thread/thread.hpp>
#include <pcl/console/time.h>
#include <vtkPolyLine.h> // VTK用于可视化连接线pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PCDReader reader;
// 读入点云PCD文件
reader.read("E:\\PCL code\\X\\background_remove\\table.pcd", *cloud);
cout << "Point cloud data: " << cloud->points.size() << " points" << endl;
//创建分割时所需要的模型系数对象coefficients及存储内点的点索引集合对象inliers。
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
// 创建分割对象
pcl::SACSegmentation<pcl::PointXYZ> seg;
// 可选择配置,设置模型系数需要优化
seg.setOptimizeCoefficients(true);
// 必须配置,设置分割的模型类型、所用随机参数估计方法
seg.setModelType(pcl::SACMODEL_PLANE);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setDistanceThreshold(0.15);// 距离阈值 单位m。距离阈值决定了点被认为是局内点时必须满足的条件
//距离阈值表示点到估计模型的距离最大值。
seg.setInputCloud(cloud);//输入点云
seg.segment(*inliers, *coefficients);//实现分割,并存储分割结果到点集合inliers及存储平面模型系数coefficients
//***********************************************************************
// 去除地面
time.tic();
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud(cloud);
extract.setIndices(inliers);
extract.setNegative(true);
extract.filter(*cloud_filtered);pcl::console::TicToc time;
time.tic();
cout << "平面提取时间:"<< time.toc() / 1000 << "s" << endl;float voxel_resultion = 0.01f; // 设置体素大小,该设置决定底层八叉树的叶子尺寸
float seed_resultion = 0.1f; // 设置种子大小,该设置决定超体素的大小
pcl::SupervoxelClustering<pcl::PointXYZ> super(voxel_resultion, seed_resultion);
super.setInputCloud(cloud_filtered); // 输入点云
super.setNormalImportance(5); // 设置法向量的权重,即表面法向量影响超体素分割结果的比重。
super.setColorImportance(0); // 设置颜色在距离测试公式中的权重,即颜色影响超体素分割结果的比重。
super.setSpatialImportance(0.4); // 设置空间距离在距离测试公式中的权重,较高的值会构建非常规则的超体素,较低的值产生的体素会按照法线
std::map<uint32_t, pcl::Supervoxel<pcl::PointXYZ>::Ptr >supervoxl_clustering;
super.extract(supervoxl_clustering);
cout << "超体素分割的体素个数为:" << supervoxl_clustering.size() << endl;int v1(0) , v2(0);
viewer->createViewPort(0, 0, 0.3, 1, v1);
viewer->setBackgroundColor(0, 0, 0, v1);
viewer->createViewPort(0.3, 0, 0.6, 1, v2);
viewer->setBackgroundColor(0, 0, 0, v2);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> color_in(cloud_filtered, 255, 0, 0);
viewer->addPointCloud<pcl::PointXYZ>(cloud_filtered, color_in, "cloud_filtered", v2);
viewer>setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "cloud_filtered", v2);
viewer->addPointCloud<pcl::PointXYZ>(cloud, "cloud", v1);
viewer>setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 255, 0, "cloud", v1);
viewer>setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "cloud", v1);
// 获取点云对应的超体素分割标签
pcl::PointCloud<pcl::PointXYZL>::Ptr supervoxel_cloud = super.getLabeledCloud();
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("VCCS"));
int v3(0);
viewer->createViewPort(0.6, 0, 0.9, 1,v3);
viewer->addPointCloud(supervoxel_cloud, "supervoxel_cloud",v3);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "supervoxel_cloud",v3);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY, 0.5, "supervoxel_cloud",v3);