This is a sample program to control 2 wheeled car with ros_control.
I preffer to use libgazebo_ros_imu_sensor.so Unmerged to gazebo_ros_pkg
roslaunch rrcar_description empty.launch
-
With simulator
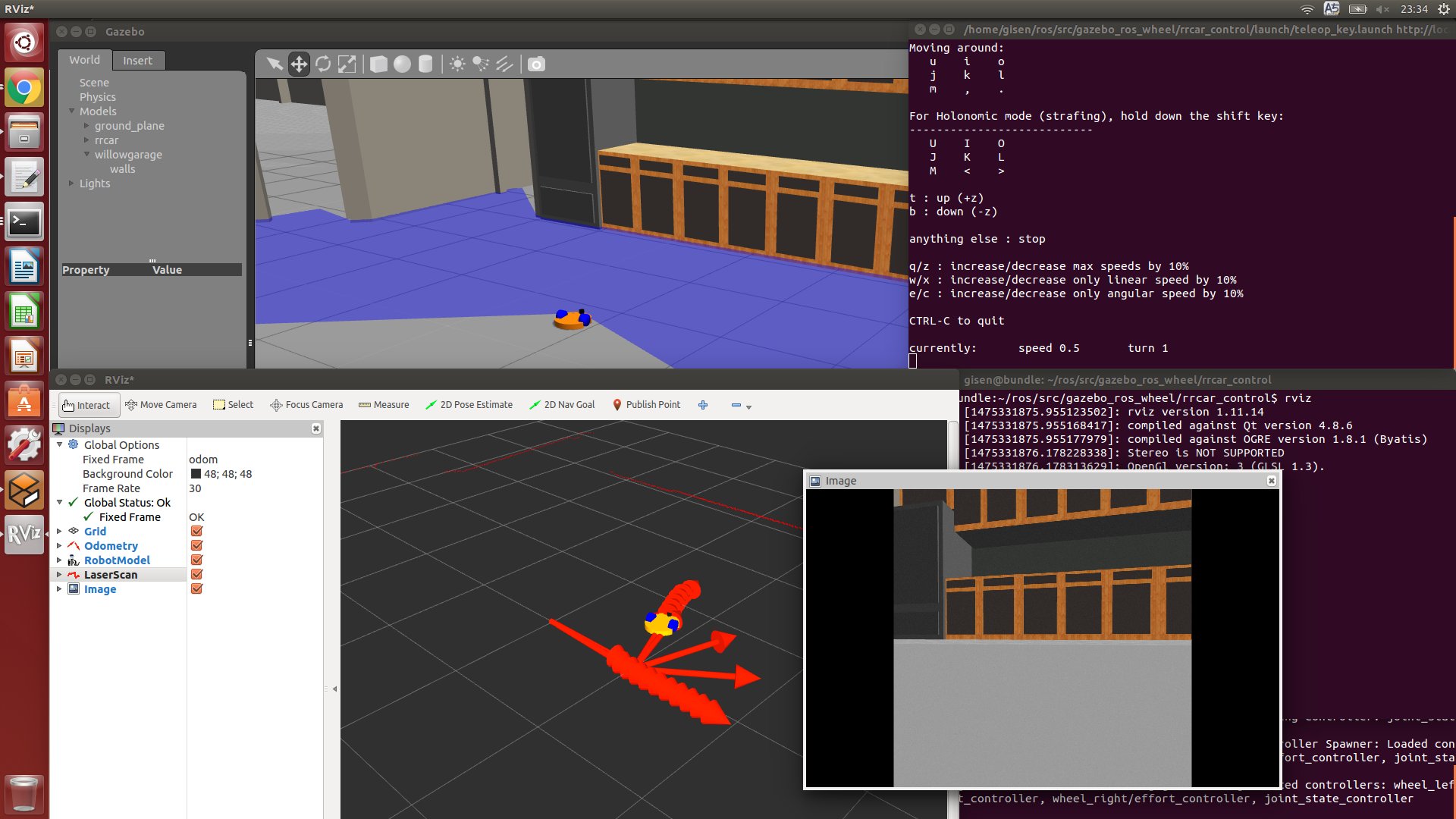
roslaunch rrcar_control rrcar_control.launch
-
With real robot
roslaunch rrcar_control rrcar_control_robot.launch
-
With keyboard
roslaunch rrcar_control teleop_key.launch
-
With joystick
roslaunch rrcar_control teleop_joy.launch
- VESC - Open Source ESC
- Electric wheel motor (e.g. light small 4 inch electric wheel motor 24V 200W)