- 18/04/2023: v0.0.2 Add static declaration for Px constants inside class.
- 14/04/2023: v0.0.1 Initial commit of stable version.
I try to simplify the use of this IC, with a minimal set of operations.
Tested with esp8266, esp32, Arduino, Arduino SAMD (Nano 33 IoT, MKR etc.), STM32 and rp2040 (Raspberry Pi Pico and similar)
PCF8574P address map 0x20-0x27 PCF8574AP address map 0x38-0x3f
To install the library execute the following command:
pip install pcf8574-libraryConstructor: Pass the address of I2C
from PCF8574 import PCF8574
pcf = PCF8574(0x38, sda=21, scl=22)To use interrupt you must pass the interrupt pin and the function to call when interrupt raised from PCF8574
from PCF8574 import PCF8574
def keyPressedOnPCF8574(pin):
# Interrupt called (No Serial no read no wire in this function, and DEBUG disabled on PCF library)
keyPressed = True
pcf = PCF8574(0x38, sda=21, scl=22, interrupt_callback=keyPressedOnPCF8574, interrupt_pin=18)You must set input/output mode:
from machine import Pin
from PCF8574 import PCF8574
pcf.Pin(PCF8574.P0, Pin.IN)
pcf.Pin(PCF8574.P1, Pin.IN, Pin.PULL_UP)
pcf.Pin(PCF8574.P2, Pin.IN)
pcf.Pin(PCF8574.P3, Pin.IN)
pcf.Pin(PCF8574.P7, Pin.OUT)
pcf.Pin(PCF8574.P6, Pin.OUT, 1)
pcf.Pin(PCF8574.P5, Pin.OUT, 0)
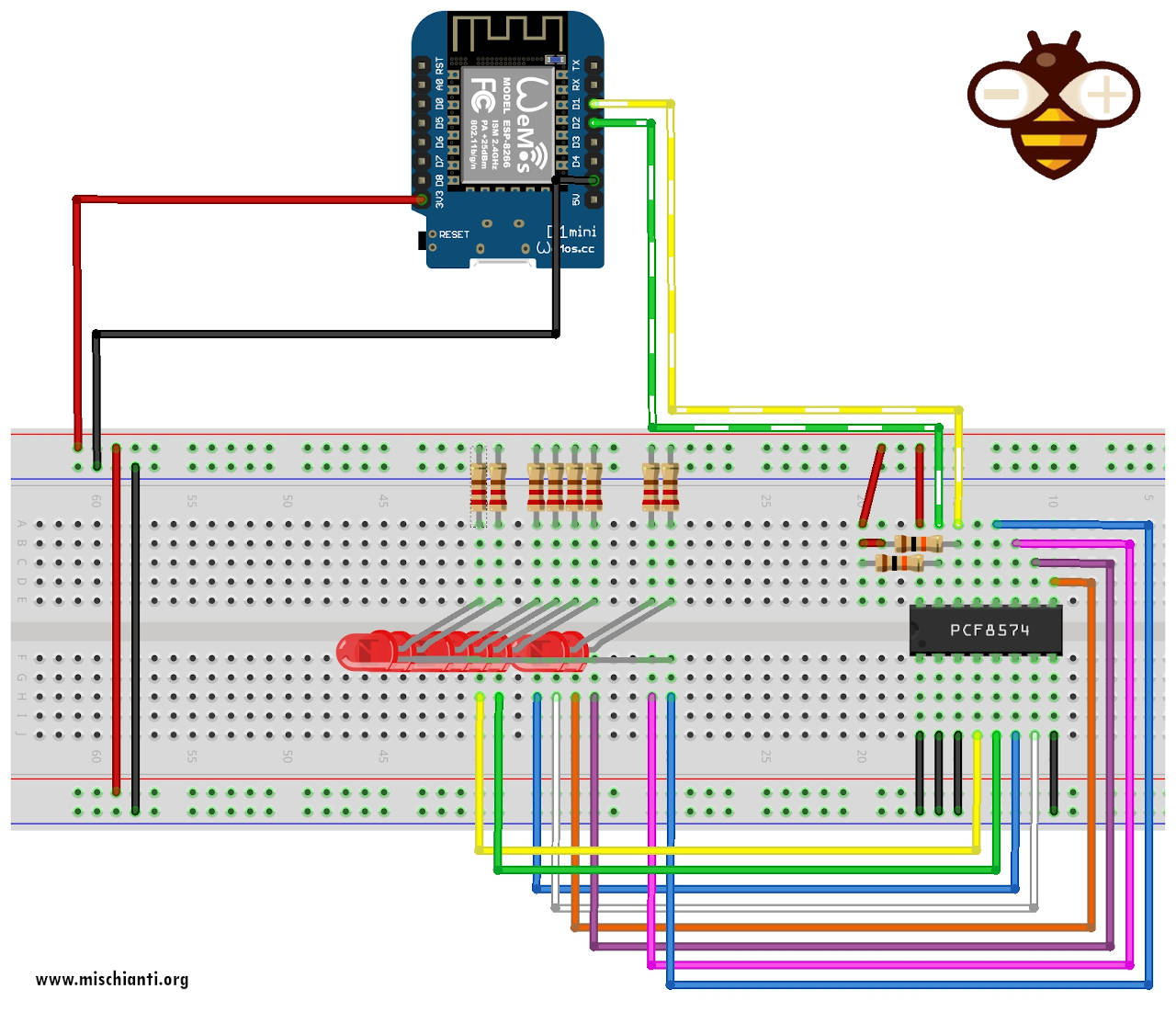
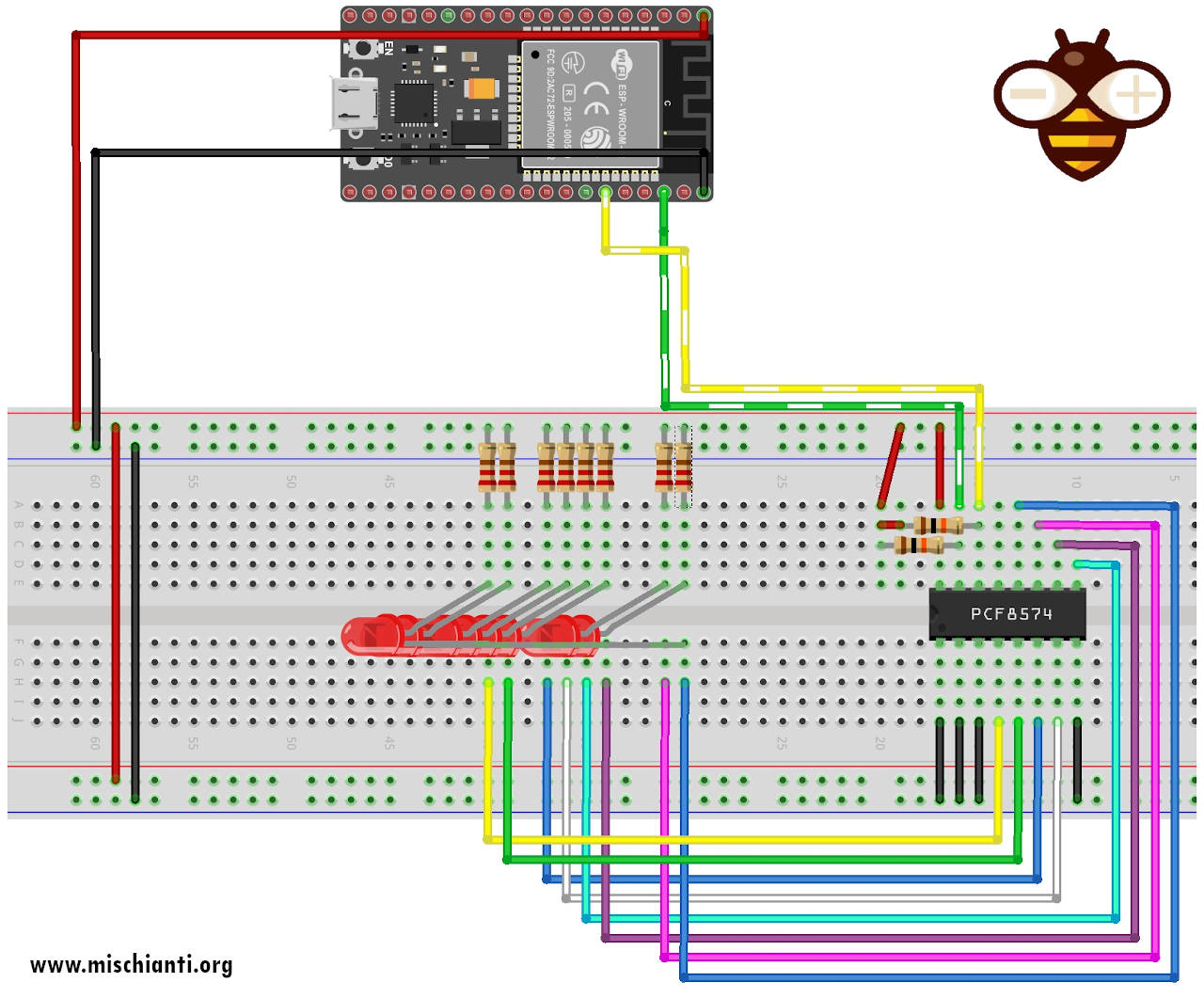
pcf.Pin(PCF8574.P4, Pin.OUT, 0)then IC as you can see in the image has 8 digital input/output ports:

To read all analog input in one trasmission you can do (even if I use a 10millis debounce time to prevent too much read from i2c):
digital_input = pcf.digital_read_all()
print(digital_input.p0)
print(digital_input.p1)
print(digital_input.p2)
print(digital_input.p3)
print(digital_input.p4)
print(digital_input.p5)
print(digital_input.p6)
print(digital_input.p7)
array_input = pcf.digital_read_all_array()
print(array_input)
byte_input = pcf.digital_read_all_byte()
print(bin(byte_input))If you want to read a single input:
digital_input = pcf.digital_read(PCF8574.P1)
print(digital_input)If you want to write a digital value:
pcf.digital_write(PCF8574.P1, 1)You can also use an interrupt pin: You must initialize the pin and the function to call when interrupt raised from PCF8574
def callback(pin):
now = utime.ticks_ms()
global count
count += 1
print("Time: {} {}".format(now, count))
pcf.attach_interrupt(18, callback)For the examples I use this wire schema on breadboard: