This repository is a Unity simulator that works alongside the ROS code in order to accurately simulate robot control. The code running on the physical robot and alongside the simulator are the same. The project above is the complete simulator without the CAD models due to their large file size. For more information, documentation, and the ROS robot code look at the robot-frc repository.
This was done using the ros-sharp library.
This is a quick demo that displays the Unity simulator working alongside ROS

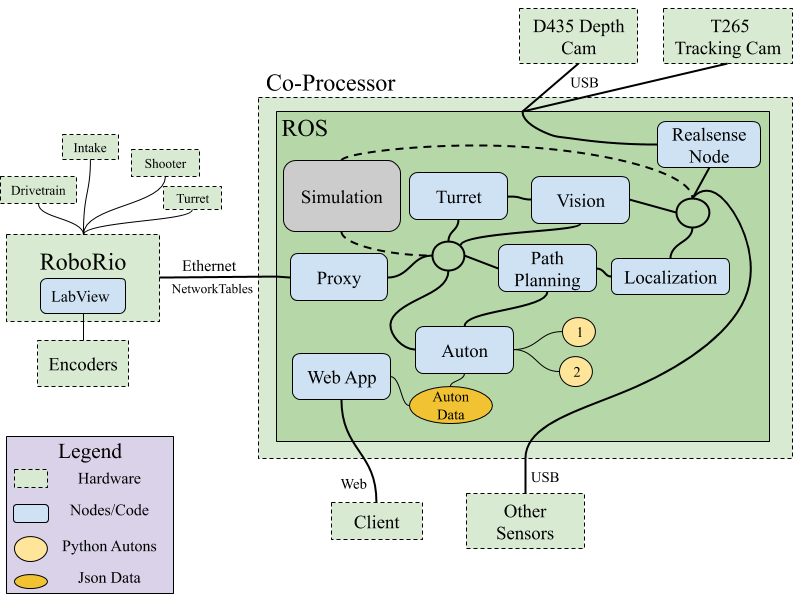
This simulator replaces the RoboRio and all the sensor sources represented below.