ESP32 port of JJRobots brilliant B-ROBOT_EVO2
The robot:

Circuit top:

Circuit bottom:

Pin connections (refer to defines.h to change):
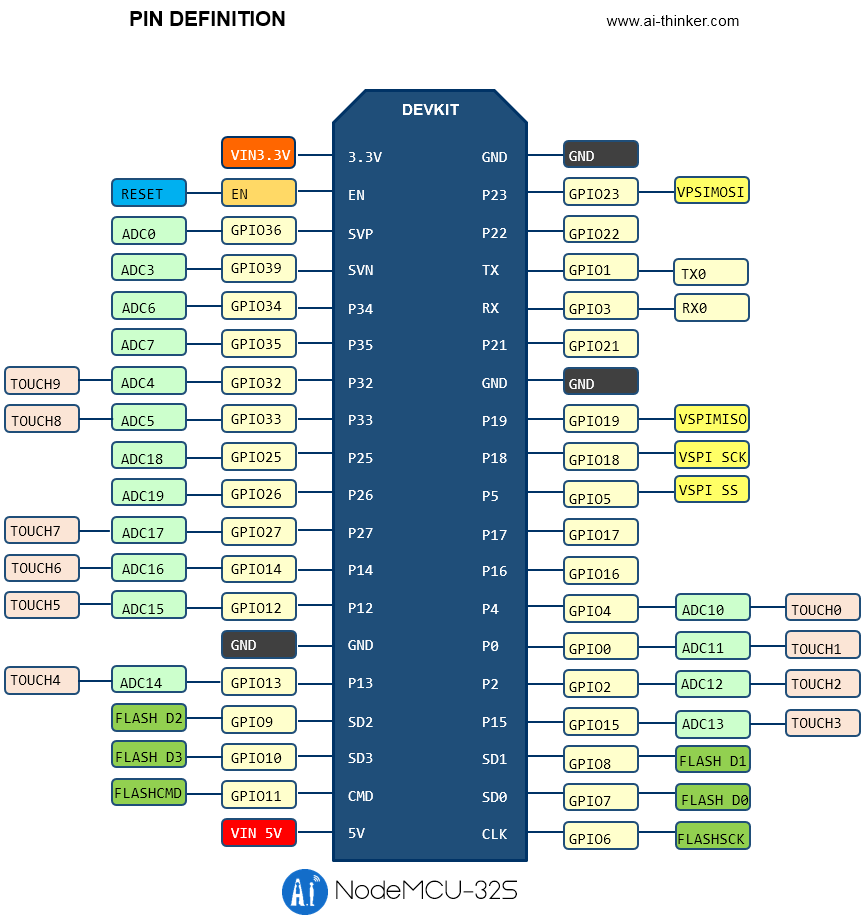
- Enable motors: P12
- Servo: P17
- Motor1 Dir: P27
- Motor1 Step: P14
- Motor2 Dir: P25
- Motor2 Step: P26
- I2C pins for gyro: (defaults) SDA=P21, SCL=P22
ESP-32 Board is a NodeMCU ESP32s, see Pinout.
{kind=link}
Important note: At the time of this writing (January 2018) the recent version of arduino-esp32 contains changes that break the I2C communication with the IMU a few seconds after startup. This version is known to work reliably for the purpose of the robot: https://github.com/espressif/arduino-esp32/tree/32c028a27e6b3c3c3df769bb42f0d87917e0309c
For more details on the I2C problem mentioned, please refer to these issues (haven't tried the forks mentioned there):