diff --git a/README.md b/README.md
index 6f54b2e..af9f0e3 100644
--- a/README.md
+++ b/README.md
@@ -23,6 +23,7 @@ Software package and ROS wrappers of the [Aruco][1] Augmented Reality marker det
 +
### ROS API
#### Messages
@@ -39,6 +40,14 @@ Software package and ROS wrappers of the [Aruco][1] Augmented Reality marker det
Header header
aruco_ros/Marker[] markers
+### Kinetic changes
+
+Updated the [Aruco][1] library to version 3.0.4
+
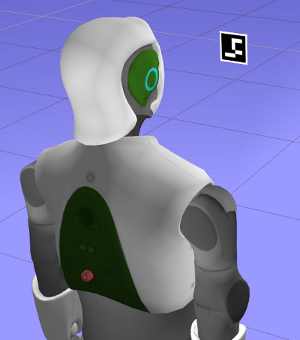
+Changed the coordinate system to match the libraries, as can be seen in the image below.
+Following rviz conventions, X is red, Y is green and Z is blue
+
+
### ROS API
#### Messages
@@ -39,6 +40,14 @@ Software package and ROS wrappers of the [Aruco][1] Augmented Reality marker det
Header header
aruco_ros/Marker[] markers
+### Kinetic changes
+
+Updated the [Aruco][1] library to version 3.0.4
+
+Changed the coordinate system to match the libraries, as can be seen in the image below.
+Following rviz conventions, X is red, Y is green and Z is blue
+ +
### Test it with REEM
* Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
diff --git a/aruco_ros/etc/new_coordinates.png b/aruco_ros/etc/new_coordinates.png
new file mode 100644
index 0000000..c5e4fe9
Binary files /dev/null and b/aruco_ros/etc/new_coordinates.png differ
+
### Test it with REEM
* Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
diff --git a/aruco_ros/etc/new_coordinates.png b/aruco_ros/etc/new_coordinates.png
new file mode 100644
index 0000000..c5e4fe9
Binary files /dev/null and b/aruco_ros/etc/new_coordinates.png differ