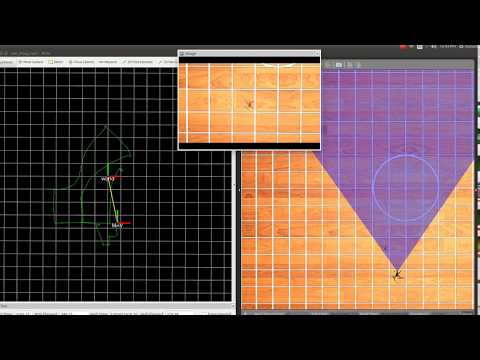
Metric-scale and bounded-drift localization of MAV with downward facing monocular camera. Aerial Robotics Laboratory, Indian Institute of Technology Kharagpur.
Check out our YouTube-Video, showing MLOG in Action
If you use this code in an academic context, please cite the following IPIN 2017 paper.
Manash Pratim Das, Gaurav Gardi, Jayanta Mukhopadhyay: 5-DoF monocular visual localization over grid based floor, 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN).
@inproceedings{das20175,
title={5-DoF monocular visual localization over grid based floor},
author={Das, Manash Pratim and Gardi, Gaurav and Mukhopadhyay, Jayanta},
booktitle={Indoor Positioning and Indoor Navigation (IPIN), 2017 International Conference on},
pages={1--7},
year={2017},
organization={IEEE}
}
Dependencies: OpenCV, Ceres-Solver, OpenMP. Run as ROS package
Contact: Manash Pratim Das (mpdmansh @ gmail . com)