+{# Load FontAwesome icons #}
+{% macro head_pre_icons() %}
+
+ You are not viewing the most recent version of this documentation.
+ The latest stable release is 0.11
+
diff --git a/version/0.10/api/_autosummary/ansys.mechanical.core.Mechanical.clear.html b/version/0.10/api/_autosummary/ansys.mechanical.core.Mechanical.clear.html
new file mode 100644
index 000000000..b84d8b940
--- /dev/null
+++ b/version/0.10/api/_autosummary/ansys.mechanical.core.Mechanical.clear.html
@@ -0,0 +1,762 @@
+
+
+
+
+
+
+
+ clear — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+clear
+
+
+Mechanical. clear ( )
+Clear the database.
+Examples
+Clear the database.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
download — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+download
+
+
+Mechanical. download ( files target_dir = None chunk_size = 262144 progress_bar = None recursive = False )
+Download files from the working directory of the Mechanical instance.
+
+It downloads them from the working directory to the target directory. It returns the list
+of local file paths for the downloaded files.
+
+
+Parameters:
+
+files str list str tuple str One or more files on the Mechanical server to download. The files must be
+in the same directory as the Mechanical instance. You can use the
+Mechanical.list_files glob expressions to
+match file names. For example, you could use file* file
+target_dir: str Default directory to copy the downloaded files to. The default is None
+chunk_size int optional Chunk size in bytes. The default is 262144
+progress_bar bool optional Whether to show a progress bar using tqdm None
+recursive bool optional Whether to use recursion when using a glob pattern search. The default is False
+
+Returns:
+
+List str List of local file paths.
+
+
+Notes
+There are some considerations to keep in mind when using the download()
+
+The glob pattern search does not search recursively in remote instances.
In a remote instance, it is not possible to list or download files in a
+location other than the Mechanical working directory.
If you are connected to a local instance and provide a file path, downloading files
+from a different folder is allowed but is not recommended.
+Examples
+Download a single file.
+>>> local_file_path_list = mechanical . download ( 'file.out' )
+
+
Download all files starting with file
+>>> local_file_path_list = mechanical . download ( 'file*' )
+
+
Download every file in the Mechanical working directory.
+>>> local_file_path_list = mechanical . download ( '*.*' )
+
+
Alternatively, the recommended method is to use the
+download_project()
+>>> local_file_path_list = mechanical . download_project ()
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
download_project — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+download_project
+
+
+Mechanical. download_project ( extensions = None target_dir = None progress_bar = False )
+Download all project files in the working directory of the Mechanical instance.
+It downloads them from the working directory to the target directory. It returns the list
+of local file paths for the downloaded files.
+
+Parameters:
+
+extensions list str tuple str optional List of extensions for filtering files before downloading them. The
+default is None
+target_dir str optional Path for downloading the files to. The default is None
+progress_bar bool optional Whether to show a progress bar using tqdm False
+
+Returns:
+
+List str List of local file paths.
+
+
+Examples
+Download all the files in the project.
+>>> local_file_path_list = mechanical . download_project ()
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
exit — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+exit
+
+
+Mechanical. exit ( force = False )
+Exit Mechanical.
+
+Parameters:
+
+force bool optional Whether to force Mechanical to exit. The default is False
+
+
+Examples
+Exit Mechanical.
+>>> mechanical . Exit ( force = True )
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
list_files — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+list_files
+
+
+Mechanical. list_files ( )
+List the files in the working directory of Mechanical.
+
+Returns:
+
+list List of files in the working directory of Mechanical.
+
+
+Examples
+List the files in the working directory.
+>>> files = mechanical . list_files ()
+>>> for file in files : print ( file )
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
log_message — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+log_message
+
+
+Mechanical. log_message ( log_level message )
+Log the message using the given log level.
+
+Parameters:
+
+log_level: str Level of logging. Options are "DEBUG" "INFO" "WARNING" "ERROR"
+message str Message to log.
+
+
+Examples
+Log a debug message.
+>>> mechanical . log_message ( 'DEBUG' , 'debug message' )
+
+
Log an info message.
+>>> mechanical . log_message ( 'INFO' , 'info message' )
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
project_directory — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+project_directory
+
+
+property Mechanical. project_directory
+Get the project directory for the currently connected Mechanical instance.
+Examples
+Get the project directory of the connected Mechanical instance.
+>>> mechanical . project_directory
+'/tmp/ANSYS.username.1/AnsysMech3F97/Project_Mech_Files/'
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
run_python_script — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+run_python_script
+
+
+Mechanical. run_python_script ( script_block enable_logging = False log_level = 'WARNING' progress_interval = 2000 )
+Run a Python script block inside Mechanical.
+It returns the string value of the last executed statement. If the value cannot be
+returned as a string, it will return an empty string.
+
+Parameters:
+
+script_block str Script block (one or more lines) to run.
+enable_logging: bool, optional Whether to enable logging. The default is False
+log_level: str Level of logging. The default is "WARNING" "DEBUG" "INFO" "WARNING" "ERROR"
+progress_interval: int, optional Frequency in milliseconds for getting log messages from the server.
+The default is 2000
+
+Returns:
+
+str Script result.
+
+
+Examples
+Return a value from a simple calculation.
+>>> mechanical . run_python_script ( '2+3' )
+'5'
+
+
Return a string value from Project object.
+>>> mechanical . run_python_script ( 'ExtAPI.DataModel.Project.ProductVersion' )
+'2023 R1'
+
+
Return an empty string, when you try to return the Project object.
+>>> mechanical . run_python_script ( 'ExtAPI.DataModel.Project' )
+''
+
+
Return an empty string for assignments.
+>>> mechanical . run_python_script ( 'version = ExtAPI.DataModel.Project.ProductVersion' )
+''
+
+
Return value from the last executed statement from a variable.
+>>> script = '''
+ addition = 2 + 3
+ multiplication = 3 * 4
+ multiplication
+ '''
+>>> mechanical.run_python_script(script)
+'12'
+
+
Return value from last executed statement from a function call.
+>>> script = '''
+ import math
+ math.pow(2,3)
+ '''
+>>> mechanical.run_python_script(script)
+'8'
+
+
Handle an error scenario.
+>>> script = 'hello_world()'
+>>> import grpc
+>>> try :
+ mechanical.run_python_script(script)
+ except grpc.RpcError as error:
+ print(error.details())
+name 'hello_world' is not defined
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
run_python_script_from_file — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+run_python_script_from_file
+
+
+Mechanical. run_python_script_from_file ( file_path enable_logging = False log_level = 'WARNING' progress_interval = 2000 )
+Run the contents a python file inside Mechanical.
+It returns the string value of the last executed statement. If the value cannot be
+returned as a string, it will return an empty string.
+
+Parameters:
+
+file_path Path for the Python file.
+enable_logging: bool, optional Whether to enable logging. The default is False
+log_level: str Level of logging. The default is "WARNING" "DEBUG" "INFO" "WARNING" "ERROR"
+progress_interval: int, optional Frequency in milliseconds for getting log messages from the server.
+The default is 2000
+
+Returns:
+
+str Script result.
+
+
+Examples
+Return a value from a simple calculation.
+Contents of simple.py file
+2+3
+>>> mechanical . run_python_script_from_file ( 'simple.py' )
+'5'
+
+
Return a value from a simple function call.
+Contents of test.py file
+import math
+math.pow(2,3)
+>>> mechanical . run_python_script_from_file ( 'test.py' )
+'8'
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
upload — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+upload
+
+
+Mechanical. upload ( file_name file_location_destination = None chunk_size = 1048576 progress_bar = True )
+Upload a file to the Mechanical instance.
+
+Parameters:
+
+file_name str Local file to upload. Only the file name is needed if the file
+is relative to the current working directory. Otherwise, the full path
+is needed.
+file_location_destination str optional File location on the Mechanical server to upload the file to. The default is
+None
+chunk_size int optional Chunk size in bytes. The default is 1048576
+progress_bar bool optional Whether to show a progress bar using tqdm True
+
+Returns:
+
+str Base name of the uploaded file.
+
+
+Examples
+Upload the hsec.x_t
+>>> mechanical . upload ( 'hsec.x_t' , progress_bar = False )
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
version — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+version
+
+
+property Mechanical. version : str
+Get the Mechanical version based on the instance.
+Examples
+Get the version of the connected Mechanical instance.
+>>> mechanical . version
+'231'
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
close_all_local_instances — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+close_all_local_instances
+
+
+ansys.mechanical.core. close_all_local_instances ( port_range = None use_thread = True )
+Close all Mechanical instances within a port range.
+You can use this method when cleaning up from a failed pool or
+batch run.
+
+Parameters:
+
+port_range list optional List of a range of ports to use when cleaning up Mechanical. The
+default is None
+use_thread bool optional Whether to use threads to close the Mechanical instances.
+The default is True
+
+
+Examples
+Close all Mechanical instances connected on local ports.
+>>> import ansys.mechanical.core as pymechanical
+>>> pymechanical . close_all_local_instances ()
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
launch_mechanical — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+launch_mechanical
+
+
+ansys.mechanical.core. launch_mechanical ( allow_input = True exec_file = None batch = True loglevel = 'ERROR' log_file = False log_mechanical = None additional_switches = None additional_envs = None start_timeout = 120 port = None ip = None start_instance = None verbose_mechanical = False clear_on_connect = False cleanup_on_exit = True version = None keep_connection_alive = True )
+Start Mechanical locally.
+
+Parameters:
+
+allow_input: bool, optional Whether to allow user input when discovering the path to the Mechanical
+executable file.
+exec_file str optional Path for the Mechanical executable file. The default is None None version
+batch bool optional Whether to launch Mechanical in batch mode. The default is True False
+loglevel str optional Level of messages to print to the console.
+Options are:
+
+"WARNING"
"ERROR"
"INFO"
+The default is WARNING
+log_file bool optional Whether to copy the messages to a file named logs.log False
+log_mechanical str optional Path to the output file on the local disk to write every script
+command to. The default is None "log_mechanical='pymechanical_log.txt'"
+additional_switches list optional Additional switches for Mechanical. The default is None
+additional_envs dictionary optional Dictionary of additional environment variables to pass. The default
+is None
+start_timeout float optional Maximum allowable time in seconds to connect to the Mechanical server.
+The default is 120
+port int optional Port to launch the Mechanical gRPC server on. The default is None 10000 PYMECHANICAL_PORT=<VALID PORT>
+ip str optional IP address to use only when start_instance False None "127.0.0.1" start_instance False
+start_instance bool optional Whether to launch and connect to a new Mechanical instance. The default
+is None ip port "127.0.0.1" 10000 True PYMECHANICAL_START_INSTANCE=FALSE
+verbose_mechanical bool optional Whether to enable printing of all output when launching and running
+a Mechanical instance. The default is False True
+clear_on_connect bool optional When start_instance False False True
+cleanup_on_exit bool optional Whether to exit Mechanical when Python exits. The default is True False
+version str optional Mechanical version to run in the three-digit format. For example, "231" None exce_file=None version
+keep_connection_alive bool optional Whether to keep the gRPC connection alive by running a background thread
+and making dummy calls for remote connections. The default is True
+
+Returns:
+
+ansys.mechanical.core.mechanical.Mechanical Instance of Mechanical.
+
+Return type:
+Mechanical
+
+Notes
+If the environment is configured to use PyPIM
+and start_instance=True
+Examples
+Launch Mechanical.
+>>> from ansys.mechanical.core import launch_mechanical
+>>> mech = launch_mechanical ()
+
+
Launch Mechanical using a specified executable file.
+>>> exec_file_path = 'C:/Program Files/ANSYS Inc/v231/aisol/bin/win64/AnsysWBU.exe'
+>>> mech = launch_mechanical ( exec_file_path )
+
+
Connect to an existing Mechanical instance at IP address 192.168.1.30 50001
+>>> mech = launch_mechanical ( start_instance = False , ip = '192.168.1.30' , port = 50001 )
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
add_child_logger — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+add_child_logger
+
+
+Logger. add_child_logger ( suffix level = None )
+Add a child logger to the main logger.
+This child logger is more general than an instance logger, which is designed to
+track the state of a Mechanical instance.
+If the logging level is specified in the arguments, a new logger with a reference
+to the _global
+
+Parameters:
+
+suffix str Name for the child logger.
+level str optional Level of logging. The default is None "DEBUG" "DEBUG" "INFO" "WARNING" "ERROR"
+
+Returns:
+
+logging.logger Logger class.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
add_handling_uncaught_exceptions — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+add_handling_uncaught_exceptions
+
+
+static Logger. add_handling_uncaught_exceptions ( logger )
+Redirect the output of an exception to a logger.
+
+Parameters:
+
+logger str Name of the logger.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
add_instance_logger — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+add_instance_logger
+
+
+Logger. add_instance_logger ( name mechanical_instance level = None )
+Add a logger for a Mechanical instance.
+The logger for a Mechanical instance has an adapter that adds contextual information,
+such as the name of the Mechanical instance. This logger is returned, and you can use it to
+log events as a normal logger. It is also stored in the _instances
+
+Parameters:
+
+name str Name for the new logger.
+mechanical_instance ansys.mechanical.core.mechanical.Mechanical Mechanical instance object. This object should contain the name
+level str optional Level of logging. The default is None "DEBUG" "DEBUG" "INFO" "WARNING" "ERROR"
+
+Returns:
+
+ansys.mechanical.core.logging.PyMechanicalCustomAdapter Logger adapter customized to add Mechanical information to the
+logs. You can use this class to log events in the same
+way you would with the logger
+
+Raises:
+
+Exception You can only input strings as name
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
file_handler — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+file_handler
+
+
+Logger. file_handler = None
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Logger — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Logger
+
+
+class ansys.mechanical.core.logging. Logger ( level = 10 to_file = False to_stdout = True filename = 'pymechanical.log' )
+Provides for adding handlers to the logger for each Mechanical session.
+This class allows you to add handlers to the logger to output to a file or
+the standard output.
+
+Parameters:
+
+level int optional Logging level for filtering the messages that are allowed in the logger.
+The default is 10 DEBUG
+to_file bool optional Whether to write log messages to a file. The default is False
+to_stdout bool optional Whether to write log messages to the standard output. The default is
+True
+filename str optional Name of the file to write log messages to. The default is pymechanical.log
+
+
+Examples
+Demonstrate logger usage from a Mechanical instance. The logger is automatically
+created when a Mechanical instance is created.
+>>> from ansys.mechanical.core import launch_mechanical
+>>> mechanical = launch_mechanical ( loglevel = 'DEBUG' )
+>>> mechanical . log . info ( 'This is a useful message' )
+INFO - - <ipython-input-24-80df150fe31f> - <module> - This is LOG debug message.
+
+
Import the PyMechanical global logger and add a file output handler.
+>>> import os
+>>> from ansys.mechanical.core import LOG
+>>> file_path = os . path . join ( os . getcwd (), 'pymechanical.log' )
+>>> LOG . log_to_file ( file_path )
+
+
Methods
+
+Attributes
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
log_to_file — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+log_to_file
+
+
+Logger. log_to_file ( filename = 'pymechanical.log' level = 10 )
+Add a file handler to the logger.
+
+Parameters:
+
+filename str optional Name of the file to write log messages to. The default is
+'pymechanical.log'
+level str optional Level of logging. The default is 10 "DEBUG" "DEBUG" "INFO" "WARNING" "ERROR"
+
+
+Examples
+Write to the pymechanical.log
+>>> from ansys.mechanical.core import LOG
+>>> import os
+>>> file_path = os . path . join ( os . getcwd (), 'pymechanical.log' )
+>>> LOG . log_to_file ( file_path )
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
log_to_stdout — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+log_to_stdout
+
+
+Logger. log_to_stdout ( level = 10 )
+Add a standard output handler to the logger.
+
+Parameters:
+
+level str optional Level of logging, such as DUBUG LOG_LEVEL
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
setLevel — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+setLevel
+
+
+Logger. setLevel ( level = 'DEBUG' )
+Change the log level of the object and the attached handlers.
+
+Parameters:
+
+level str optional Level of logging, such as DUBUG LOG_LEVEL
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
std_out_handler — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+std_out_handler
+
+
+Logger. std_out_handler = None
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
exit — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+exit
+
+
+LocalMechanicalPool. exit ( block = False )
+Exit all Mechanical instances in the pool.
+
+Parameters:
+
+block bool optional Whether to wait until all processes close before exiting
+all instances in the pool. The default is False
+
+
+Examples
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
LocalMechanicalPool — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+LocalMechanicalPool
+
+
+class ansys.mechanical.core.pool. LocalMechanicalPool ( n_instances wait = True port = 10000 progress_bar = True restart_failed = True ** kwargs )
+Create a pool of Mechanical instances.
+
+Parameters:
+
+n_instance int Number of Mechanical instances to create in the pool.
+wait bool optional Whether to wait for the pool to be initialized. The default is
+True False
+starting_port int optional Starting port for the instances. The default is 10000
+progress_bar bool optional Whether to show a progress bar when starting the pool. The default
+is True wait=False
+restart_failed bool optional Whether to restart any failed instances in the pool. The default is
+True
+**kwargs dict optional Additional keyword arguments. For a list of all keyword
+arguments, use the ansys.mechanical.core.launch_mechanical() exec_file
+
+
+
+Examples
+Create a pool of 10 Mechanical instances.
+>>> from ansys.mechanical.core import LocalMechanicalPool
+>>> pool = LocalMechanicalPool ( 10 )
+Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+
On Windows, create a pool while specifying the Mechanical executable file.
+>>> exec_file = 'C:/Program Files/ANSYS Inc/v231/aisol/bin/winx64/AnsysWBU.exe'
+>>> pool = LocalMechanicalPool ( 10 , exec_file = exec_file )
+Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+
On Linux, create a pool while specifying the Mechanical executable file.
+>>> exec_file = '/ansys_inc/v231/aisol/.workbench'
+>>> pool = LocalMechanicalPool ( 10 , exec_file = exec_file )
+Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+
In the PyPIM environment, create a pool.
+>>> pool = LocalMechanicalPool ( 10 , version = "231" )
+Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+
Methods
+
+Attributes
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
map — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+map
+
+
+LocalMechanicalPool. map ( func iterable = None clear_at_start = True progress_bar = True close_when_finished = False timeout = None wait = True )
+Run a user-defined function on each Mechanical instance in the pool.
+
+Parameters:
+
+func function Function with mechanical
+iterable list tuple optional An iterable containing a set of arguments for the function.
+The default is None
+clear_at_start bool optional Clear Mechanical at the start of execution. The default is
+True False
+progress_bar bool optional Whether to show a progress bar when running the batch of input
+files. The default is True wait=False
+close_when_finished bool optional Whether to close the instances when the function finishes running
+on all instances in the pool. The default is False
+timeout float optional Maximum runtime in seconds for each iteration. The default is
+None
+wait bool optional Whether block execution must wait until the batch process is
+complete. The default is True
+
+Returns:
+
+list A list containing the return values for the function.
+Failed runs do not return an output. Because return values
+are not necessarily in the same order as the iterable,
+you might want to add some sort of tracker to the return
+of your function.
+
+
+Examples
+Run several input files while storing the final routine. Note
+how the function to map must use mechanical
+>>> from ansys.mechanical.core import LocalMechanicalPool
+>>> pool = LocalMechanicalPool ( 10 )
+>>> completed_indices = []
+>>> def function ( mechanical , name , script ):
+ # name, script = args
+ mechanical.clear()
+ output = mechanical.run_python_script(script)
+ return name, output
+>>> inputs = [( "first" , "2+3" ), ( "second" , "3+4" )]
+>>> output = pool . map ( function , inputs , progress_bar = False , wait = True )
+[('first', '5'), ('second', '7')]
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
next_available — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+next_available
+
+
+LocalMechanicalPool. next_available ( return_index = False )
+Wait until a Mechanical instance is available and return this instance.
+
+Parameters:
+
+return_index bool optional Whether to return the index along with the instance. The default
+is False
+
+Returns:
+
+pymechanical.Mechanical Instance of Mechanical.
+int Index within the pool of Mechanical instances. This index
+is not returned by default.
+
+
+Examples
+>>> mechanical = pool . next_available ()
+>>> mechanical
+Ansys Mechanical [Ansys Mechanical Enterprise]
+Product Version:231
+Software build date:Wed Jul 13 14:29:54 2022
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
ports — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ports
+
+
+property LocalMechanicalPool. ports
+Get a list of the ports that are used.
+Examples
+Get the list of ports used by the pool of Mechanical instances.
+>>> pool . ports
+[10001, 10002]
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
run_batch — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+run_batch
+
+
+LocalMechanicalPool. run_batch ( files clear_at_start = True progress_bar = True close_when_finished = False timeout = None wait = True )
+Run a batch of input files on the Mechanical instances in the pool.
+
+Parameters:
+
+files list List of input files.
+clear_at_start bool optional Whether to clear Mechanical when execution starts. The default is
+True False
+progress_bar bool optional Whether to show a progress bar when running the batch of input
+files. The default is True wait=False
+close_when_finished bool optional Whether to close the instances when running the batch
+of input files is finished. The default is False
+timeout float optional Maximum runtime in seconds for each iteration. The default is
+None
+wait bool optional Whether block execution must wait until the batch process is complete.
+The default is True
+
+Returns:
+
+list List of text outputs from Mechanical for each batch run. The outputs
+are not necessarily listed in the order of the inputs. Failed runs do
+not return an output. Because the return outputs are not
+necessarily in the same order as iterable
+
+
+Examples
+Run 20 verification files on the pool.
+>>> files = [ f "test { index } .py" for index in range ( 1 , 21 )]
+>>> outputs = pool . run_batch ( files )
+>>> len ( outputs )
+20
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
change_default_mechanical_path — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+change_default_mechanical_path
+
+
+ansys.tools.path. change_default_mechanical_path ( exe_loc )
+Change your default Mechanical path.
+
+Parameters:
+
+exe_loc str Full path for the Mechanical executable file to use.
+
+Return type:
+None
+
+Examples
+On Windows:
+>>> from ansys.tools.path import change_default_mechanical_path , get_mechanical_path
+>>> change_default_mechanical_path ( 'C:/Program Files/ANSYS Inc/v231/aisol/bin/win64/AnsysWBU.exe' )
+>>> get_mechanical_path ()
+'C:/Program Files/ANSYS Inc/v231/aisol/bin/win64/AnsysWBU.exe'
+
+
On Linux:
+>>> from ansys.tools.path import change_default_mechanical_path , get_mechanical_path
+>>> change_default_mechanical_path ( '/ansys_inc/v231/aisol/.workbench' )
+>>> get_mechanical_path ()
+'/ansys_inc/v231/aisol/.workbench'
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
find_mechanical — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+find_mechanical
+
+
+ansys.tools.path. find_mechanical ( version = None supported_versions = {191: '19.1', 192: '19.2', 193: '19.3', 194: '19.4', 195: '19.5', 201: '2020R1', 202: '2020R2', 211: '2021R1', 212: '2021R2', 221: '2022R1', 222: '2022R2', 231: '2023R1', 232: '2023R2', 241: '2024R1', 242: '2024R2'} )
+Search for the Mechanical path in the standard installation location.
+
+Returns:
+
+mechanical_path str Full path to the executable file for the latest Mechanical version.
+version float str Version in the float format. For example, 23.1
+
+Return type:
+Union Tuple str float Tuple Literal '' Literal ''
+
+Examples
+On Windows:
+>>> from ansys.tools.path import find_mechanical
+>>> find_mechanical ()
+('C:/Program Files/ANSYS Inc/v231/aisol/bin/winx64/AnsysWBU.exe', 23.1)
+
+
On Linux:
+>>> find_mechanical ()
+('/usr/ansys_inc/v231/aisol/.workbench', 23.1)
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
get_mechanical_path — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+get_mechanical_path
+
+
+ansys.tools.path. get_mechanical_path ( allow_input = True version = None find = True )
+Acquires Ansys Mechanical Path
+First, it looks in the configuration file, used by save_mechanical_path
+Then, it tries to find it based on conventions for where it usually is.
+Lastly, it takes user input
+
+Parameters:
+
+allow_input bool optional Allow user input to find Ansys Mechanical path. The default is True
+version float optional Version of Ansys Mechanical to search for. For example version=22.2 None
+find: bool, optional Allow ansys-tools-path to search for Ansys Mechanical in typical installation locations
+
+Return type:
+Optional str
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
save_mechanical_path — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+save_mechanical_path
+
+
+ansys.tools.path. save_mechanical_path ( exe_loc = None allow_prompt = True )
+Find the Mechanical path or query user.
+
+Parameters:
+
+exe_loc str optional Path for the Mechanical executable file (AnsysWBU.exe None
+
+If a path is supplied, this method performs some checks. If the
+checks are successful, it writes this path to the configuration
+file.
+
+Returns:
+
+str Path for the Mechanical executable file.
+
+Return type:
+str
+
+Notes
+The location of the configuration file config.txt ansys.tools.path.SETTINGS_DIR
+>>> from ansys.tools.path import SETTINGS_DIR
+>>> import os
+>>> print ( os . path . join ( SETTINGS_DIR , "config.txt" ))
+C:/Users/[username]]/AppData/Local/Ansys/ansys_tools_path/config.txt
+
+
You can change the default for the exe_loc config.txt
+>>> from ansys.tools.path import save_mechanical_path
+>>> save_mechanical_path ( "/new/path/to/executable" )
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ You are not viewing the most recent version of this documentation.
+ The latest stable release is 0.11
+
diff --git a/version/0.10/api/helper.html b/version/0.10/api/helper.html
new file mode 100644
index 000000000..d560c04d1
--- /dev/null
+++ b/version/0.10/api/helper.html
@@ -0,0 +1,738 @@
+
+
+
+
+
+
+
+ Helper functions — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Helper functions
+These methods provide helper functions for launching Mechanical, closing Mechanical instances, and automating other tasks.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
API reference — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+API reference
+This section describes PyMechanical classes, functions, and attributes.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Logging — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Logging
+To make the logging of events consistent, PyMechanical has a specific
+logging architecture with global and local logging instances.
+For these two types of loggers, here is the default format for a log message:
+>>> from ansys.mechanical.core import launch_mechanical
+>>> mechanical = launch_mechanical ()
+>>> mechanical . _log . info ( "This is an useful message" )
+ LEVEL - INSTANCE NAME - MODULE - FUNCTION - MESSAGE
+ INFO - GRPC_127.0.0.1:10000 - test - <module> - This is a useful message
+
+
The instance_name
+Because both types of loggers are based in the Python logging
+
+Logger
+
+Logger
Provides for adding handlers to the logger for each Mechanical session.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Mechanical — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Mechanical
+This section describes the methods for working with a Mechanical gRPC server using the following class:
+Mechanical
+
+
+class ansys.mechanical.core.mechanical. Mechanical ( ip = None port = None timeout = 60.0 loglevel = 'WARNING' log_file = False log_mechanical = None cleanup_on_exit = False channel = None remote_instance = None keep_connection_alive = True ** kwargs )
+Connects to a gRPC Mechanical server and allows commands to be passed.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Ansys path tools — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Local Mechanical Pool — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Local Mechanical Pool
+This section describes how to work with a local pool of Mechanical instances.
+
+LocalMechanicalPool Class
+LocalMechanicalPool
+
+
+class ansys.mechanical.core.pool. LocalMechanicalPool ( n_instances wait = True port = 10000 progress_bar = True restart_failed = True ** kwargs )
+Create a pool of Mechanical instances.
+
+Parameters:
+
+n_instance int Number of Mechanical instances to create in the pool.
+wait bool optional Whether to wait for the pool to be initialized. The default is
+True False
+starting_port int optional Starting port for the instances. The default is 10000
+progress_bar bool optional Whether to show a progress bar when starting the pool. The default
+is True wait=False
+restart_failed bool optional Whether to restart any failed instances in the pool. The default is
+True
+**kwargs dict optional Additional keyword arguments. For a list of all keyword
+arguments, use the ansys.mechanical.core.launch_mechanical() exec_file
+
+
+
+Examples
+Create a pool of 10 Mechanical instances.
+>>> from ansys.mechanical.core import LocalMechanicalPool
+>>> pool = LocalMechanicalPool ( 10 )
+Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+
On Windows, create a pool while specifying the Mechanical executable file.
+>>> exec_file = 'C:/Program Files/ANSYS Inc/v231/aisol/bin/winx64/AnsysWBU.exe'
+>>> pool = LocalMechanicalPool ( 10 , exec_file = exec_file )
+Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+
On Linux, create a pool while specifying the Mechanical executable file.
+>>> exec_file = '/ansys_inc/v231/aisol/.workbench'
+>>> pool = LocalMechanicalPool ( 10 , exec_file = exec_file )
+Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+
In the PyPIM environment, create a pool.
+>>> pool = LocalMechanicalPool ( 10 , version = "231" )
+Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
PyMechanical architecture — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+ PyMechanical architecture
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+PyMechanical architecture
+PyMechanical provides a Python interface to Ansys Mechanical. Mechanical is a
+polyglot desktop app whose graphical user interface (GUI) runs on either
+the Windows or Linux operating system. Mechanical’s APIs are implemented in C#
+using .NET Framework 4.x. They are exposed to both C# and two implementations
+ of Python, namely IronPython and CPython.
+Within Mechanical, Python scripting enables you to automate repetitive GUI
+actions. This is not unlike other apps developed either by Ansys or other
+software companies. Python scripting leverages the Mechanical API.
+Mechanical, like some other apps, is customizable. Using the same API that you
+would use for scripting, you can implement extensions that add to the
+capabilities of Mechanical. For example, buttons can be added to the GUI and
+custom objects can be added to the data model. Even third-party or in-house
+solvers can be integrated into Mechanical and can take advantage of the
+powerful meshing, generic CAD reader, and the intuitive pre- and post-
+processing experience of Mechanical.
+Before discussing how Mechanical’s API is implemented, we discuss a software
+design pattern known as the command pattern . This pattern can be used in many
+programming languages. For a general description (using the Java programming
+language) of the command pattern, see Command Design Pattern in the
+HowToDoInJava newsletter. Our own brief explanation follows.
+
+Command pattern
+Many interactive apps use the command pattern. It turns anything that the user
+does within the app into a command object, which is immediately executed. This
+approach carries some additional benefits .
+More relevant to this discussion is how command patterns can be used to
+implement automation APIs. If every action is a command, then that Command can
+serve as the API. So long as the Commands can be encoded in text, a scripting
+language can be used to execute them. In fact, this approach is roughly how the
+Ansys Electronics Desktop, Ansys Mechanical APDL, and the Ansys Workbench apps
+implement automation APIs for scripting.
+Using the command pattern as a scripting API has disadvantages. Most
+importantly, command APIs are not symmetric. The four fundamental operations on
+data within a software app are Create Read Update Delete
+
+
+Mechanical API implementation
+Mechanical’s API serves the needs of both automation and customization . For
+customization, it is necessary to read the data model. For example, when
+integrating a third-party solver, you must access boundary conditions,
+geometry, material properties, mesh, and connections to properly input them to
+the solver. As discussed earlier, the command pattern does not allow this kind
+of access. Due to this fact, the Mechanical API exposes its data model directly
+to the user. This is how a hypothetical command-based API would look for
+renaming an object.
+RenameCommand ( id = 100 , name = "New name" )
+
+
Instead, an API based on a data model, like Mechanical’s API, looks like this:
+obj = GetObject ( id = 100 )
+print ( obj . Name )
+obj . Name = "New name"
+
+
Notice that you could print the name by Reading a property of the object. A
+command-based API can not provide the same experience.
+
+
+PyMechanical remote interface
+One way to interact with the Mechanical API from Python is as a remote session.
+You can run Mechanical as a server and send a Remote Procedure Call (RPC).
+The server handles the RPC and returns the response to the client. Currently,
+sending commands as a string and getting the result as a string is the only
+option.
+
+
+PyMechanical embedded instance
+The embedded instance used by PyMechanical embeds an entire instance of the
+Mechanical app in-memory inside of a Python program. There is no additional
+running process associated with it. Mechanical’s data model is directly
+available within Python, which means that the fully CRUD data model of the
+Mechanical API can be used.
+
+
+
+Distributed systems
+This section contains a very basic explanation of distributed systems . It is
+not meant be exhaustive and rigorous, but it instead introduces just the topics
+necessary as simply as possible to help you understand the choices made by the
+designers of PyMechanical.
+A distributed system is a software system that uses a network to distribute
+software across physical machines. With a distributed system, the individual
+pieces of that system do not share an address space and therefore cannot call
+functions of each other directly. Instead, they communicate with each other by
+sending messages to each other. Examples include email, multiplayer games, web
+apps, and high-performance computing, among other things.
+Distributed systems have unique characteristics when compared to classical
+software systems that share an address space. For instance, in a distributed
+system, any call can fail because of a problem with the network, and the caller
+can not always know whether a call has failed. For this reason, features of
+interest to distributed system designers, such as fault tolerance, redundancy,
+and idempotency, are not emphasized by classical software systems.
+In a distributed system, any computer can theoretically talk to any other
+computer. However, it is useful to divide them conceptually into clients and
+servers. Clients send requests to servers. Servers are expected return a
+response to the client.
+There are protocols that describe how information moves between
+computers. We begin with an explanation of remote procedure calls.
+
+Remote procedure calls
+When one computer invokes a procedure on another computer using a network, it
+is said to have done an RPC. Unlike a normal procedure call, it can be
+unreliable and orders of magnitude slower. There also needs to be a handshake
+so that both sides understand how to interpret the bytes that move between
+computers . This handshake can be negotiated byte-per-byte, but in
+practice, the internet protocols provide useful conventions and standards that
+have been tried and tested.
+While standards are useful, it is not practical for every developer to craft
+packets to send over the wire by hand. In many programming languages, libraries,
+and tools wrap around the most popular conventions of internet protocols. These
+libraries and tools can be opinionated in how RPCs can and should be written.
+Some offer low-level method invocation facilities, like gRPC and zeroMQ. Others
+take a view on how RPCs should be done. Two such views are Representational
+State Transfer (REST) and Remote Method Invocation (RMI).
+
+
+REST
+The design principles of REST are often credited as being responsible for the
+infinite scalability of the internet. It can be thought of as a set of styles
+or constraints that most web apps comply with or at least try to. Since REST
+is not an official standard, it can be implemented on any protocol. Since it
+was designed for HTTP, it is usually associated with it and its direct
+descendants . However, the principles of REST can be applied on any
+protocol.
+Applications that conform to REST are said to provide RESTful APIs. For a more
+detailed description, see What is a REST API
+<https://www.redhat.com/en/topics/api/what-is-a-rest-api> on the Red Hat
+Technology Topics page.
+
+
+Remote method invocation
+In the nineties, Object Oriented Programming (OOP) exploded in popularity.
+Among other things, OOP allows programmers to add abstractions on top of data
+in their code using objects. When done well, objects can reduce code complexity
+and makes large scale software easier to reason about. It was thought that even
+the difference between RPCs and calls made in a program’s address space could
+be abstracted. In effect, the user of an object does not need to know whether
+an object exists remotely or locally. Operations on that object could be done
+in the same way, regardless.
+This approach is known as Remote Method Invocation (RMI). RMI was widely
+implemented using CORBA, DCOM, Remoting (.NET), and Java RMI. However, this
+approach has fallen out of favor with the rise of the internet, as it was
+observed that it does not scale in the same way that something like REST does.
+As it became less popular, tools, and library support fell away. For instance,
+recent versions of .NET do not implement the Remoting library, and COM/DCOM are
+no longer taken seriously by web apps.
+For an illuminating discussion of the problems with RMI, see Microservices and
+the First Law of Distributed Objects on
+Martin Fowler’s website.
+
+
+
+Remote mechanical
+Mechanical’s official API is that of an object model, and PyMechanical provides
+exactly that API to Python. Because object models are not suitable as remote
+APIs, PyMechanical does not provide that API in a remote fashion. This is why
+the remote session API is based on strings, while the embedded instance API can
+provide the Mechanical API directly to Python.
+
+A different remote interface
+An alternative remote API for Mechanical is practical so long as it is not
+using RMI. In fact, Mechanical uses a REST API internally as part of its GUI.
+This is not the official Mechanical API and is not currently documented. A new
+remote interface for Mechanical is not an immediate goal of PyMechanical.
+
+
+Using PyMechanical in a distributed system
+You can still build a distributed system where Mechanical is run remotely using
+the embedded instance of Mechanical in PyMechanical. For this to work, Python
+itself would run remotely, and therefore the embedded instance would run
+remotely. The communication across the network in that system would be done in
+Python.
+Footnotes
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Contribute — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Contribute
+Overall guidance on contributing to a PyAnsys library appears in
+Contributing
+in the PyAnsys Developer’s Guide . Ensure that you are thoroughly familiar
+with this guide before attempting to contribute to PyMechanical.
+The following contribution information is specific to PyMechanical.
+
+Install in developer mode
+Installing PyMechanical in developer mode allows
+you to modify the source and enhance it.
+
+To install PyMechanical in developer mode, perform these steps:
+
+Clone the pymechanical
+ clone https://github.com/ansys/pymechanical
+
+
Access the pymechanical
+
+Create a clean Python virtual environment and activate it:
+
+
+
+Windows
+
+
+
+CMD
+
+
+
+
+
+PowerShell
+
+
+
+
+
+
+
+Linux/UNIX
+
+
+
+
+Ensure that you have the latest required build system tools:
+ -m pip install -U pip tox flit twine
+
+
Install the project in editable mode:
+# Install the minimum requirements
+python -m pip install -e .
+
+# Install the minimum + tests requirements
+python -m pip install -e .[ tests]
+
+# Install the minimum + doc requirements
+python -m pip install -e .[ doc]
+
+# Install all requirements
+python -m pip install -e .[ tests,doc]
+
+
Verify your development installation:
+
+
+
+
+
+Test PyMechanical
+PyMechanical uses PyTest and tox for unit testing.
+
+Using tox
+This project takes advantage of tox . This tool automates common development
+tasks (similar to Makefile
+While Makefile tox tox
+The following environment commands are provided:
+
+tox -e style
tox -e py
tox -e py-coverage
tox -e doc
+
+
+Without tox
+If required, from the command line, you can call style commands like
+black , isort , and flake8 . You can also call unit testing commands like PyTest .
+However, running these commands do not guarantee that your project is being tested
+in an isolated environment, which is the reason why tools like tox
+
+
+Remote testing
+If you do not have a licensed copy of Mechanical installed locally but want to
+run PyMechanical unit tests on a remote instance, you must set up environment
+variables.
+On Linux
+export PYMECHANICAL_START_INSTANCE = False
+export PYMECHANICAL_PORT =< MECHANICAL Port > ( default 10000 )
+export PYMECHANICAL_IP =< MECHANICAL IP > ( default 127.0.0.1 )
+
+
On Windows
+SET PYMECHANICAL_START_INSTANCE = False
+SET PYMECHANICAL_PORT =< MECHANICAL Port > ( default 10000 )
+SET PYMECHANICAL_IP =< MECHANICAL IP > ( default 127.0.0.1 )
+
+
The environment variables for your operating system tell PyMechanical
+to attempt to connect to the existing Mechanical service by default
+when you use the launch_mechanical()
+
+
+
+Documentation
+For building documentation, you can run the usual rules provided in the
+Sphinx make
+# build and view the doc from the POSIX system
+make -C doc/ html && your_browser_name doc/html/index.html
+
+# build and view the doc from a Windows environment
+.\d oc\m ake.bat clean
+.\d oc\m ake.bat html
+start .\d oc\_ build\h tml\i ndex.html
+
+
However, the recommended way of checking documentation integrity is to use
+tox
+ -e doc && your_browser_name .tox/doc_out/index.html
+
+
+
+Distributing
+If you would like to create either source or wheel files, start by installing
+the building requirements and then executing the build module:
+ -m pip install -U pip
+python -m flit build
+python -m twine check dist/*
+
+
+
+Post issues
+Use the PyMechanical Issues
+page to submit questions, report bugs, and request new features. When possible,
+use these templates:
+
+Bug report
Feature request
+If your issue does not fit into one of these template categories, create your own issue.
+To reach the project support team, email pyansys. core@ ansys. com .
+
+
+View documentation
+Documentation for the latest stable release of PyMechanical is hosted at
+PyMechanical Documentation .
+In the upper right corner of the documentation’s title bar, there is an option
+for switching from viewing the documentation for the latest stable release
+to viewing the documentation for the development version or previously
+released versions.
+
+
+Code style
+As indicated in Coding style
+in the PyAnsys Developer’s Guide , PyMechanical follows PEP8 guidelines. PyMechanical
+implements pre-commit for style checking.
+To ensure your code meets minimum code styling standards, run these commands:
+pip install pre - commit
+pre - commit run -- all - files
+
+
You can also install this as a pre-commit hook by running this command:
+
+This way, it’s not possible for you to push code that fails the style checks:
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ You are not viewing the most recent version of this documentation.
+ The latest stable release is 0.11
+
diff --git a/version/0.10/examples/gallery_examples/announcement.html b/version/0.10/examples/gallery_examples/announcement.html
new file mode 100644
index 000000000..a838ea4eb
--- /dev/null
+++ b/version/0.10/examples/gallery_examples/announcement.html
@@ -0,0 +1,4 @@
+
+ You are not viewing the most recent version of this documentation.
+ The latest stable release is 0.11
+
diff --git a/version/0.10/examples/gallery_examples/embedding_n_remote/announcement.html b/version/0.10/examples/gallery_examples/embedding_n_remote/announcement.html
new file mode 100644
index 000000000..a838ea4eb
--- /dev/null
+++ b/version/0.10/examples/gallery_examples/embedding_n_remote/announcement.html
@@ -0,0 +1,4 @@
+
+ You are not viewing the most recent version of this documentation.
+ The latest stable release is 0.11
+
diff --git a/version/0.10/examples/gallery_examples/embedding_n_remote/embedding_remote.html b/version/0.10/examples/gallery_examples/embedding_n_remote/embedding_remote.html
new file mode 100644
index 000000000..560eb346c
--- /dev/null
+++ b/version/0.10/examples/gallery_examples/embedding_n_remote/embedding_remote.html
@@ -0,0 +1,1292 @@
+
+
+
+
+
+
+
+ Remote & Embedding Example — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+ Remote & Embedding Example
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Remote & Embedding Example
+This code, which uses the same example, first demonstrates how to use
+a remote session and then demonstrates how to use an embedding instance.
+
+Remote Session
+
+Download required files
+Download the required files. Print the file paths for the geometry file and
+script file.
+import os
+
+from ansys.mechanical.core import launch_mechanical
+from ansys.mechanical.core.examples import download_file
+
+geometry_path = download_file ( "Valve.pmdb" , "pymechanical" , "embedding" )
+print ( f "Downloaded the geometry file to: { geometry_path } " )
+
+script_file_path = download_file ( "remote_script.py" , "pymechanical" , "embedding" )
+print ( f "Downloaded the script file to: { script_file_path } " )
+
+
+
+
+Launch Mechanical
+Launch a new Mechanical session in batch, setting cleanup_on_exit False mechanical.exit()
+import os
+
+from ansys.mechanical.core import launch_mechanical
+
+# Launch mechanical
+mechanical = launch_mechanical ( batch = True , loglevel = "DEBUG" )
+print ( mechanical )
+
+
+
+
+Initialize variable for workflow
+Set the part_file_path
+
+
+
+
+Run mechanical automation script
+Run remote_script.py in the mechanical remote session.
+
+
+
+
+Get list of generated files
+
+
+
+
+Write the file contents to console
+def write_file_contents_to_console ( path , number_lines =- 1 ):
+ count = 1
+ with open ( path , "rt" ) as file :
+ for line in file :
+ if number_lines == - 1 or count <= number_lines :
+ print ( line , end = "" )
+ count = count + 1
+ else :
+ break
+
+
+
+Download files back to local working directory
+
+
+
+
+Exit remote session
+Close the Mechanical instance.
+
+
+
+
+Embedded Instance
+
+Download the geometry file
+Download Valve.pmdb.
+import os
+
+import ansys.mechanical.core as mech
+from ansys.mechanical.core.examples import download_file
+
+geometry_path = download_file ( "Valve.pmdb" , "pymechanical" , "embedding" )
+print ( f "Downloaded the geometry file to: { geometry_path } " )
+
+
+
+
+Embed Mechanical and set global variables
+Find the mechanical installation path & version.
+Open an embedded instance of Mechanical and set global variables.
+app = mech . App ()
+globals () . update ( mech . global_variables ( app ))
+print ( app )
+
+
+
+
+Add Static Analysis
+Add static analysis to the Model.
+analysis = Model . AddStaticStructuralAnalysis ()
+
+
+
+
+Assign material
+matAssignment = Model . Materials . AddMaterialAssignment ()
+tempSel = ExtAPI . SelectionManager . CreateSelectionInfo (
+ Ansys . ACT . Interfaces . Common . SelectionTypeEnum . GeometryEntities
+)
+bodies = [
+ body
+ for body in ExtAPI . DataModel . Project . Model . Geometry . GetChildren (
+ Ansys . Mechanical . DataModel . Enums . DataModelObjectCategory . Body , True
+ )
+]
+geobodies = [ body . GetGeoBody () for body in bodies ]
+ids = System . Collections . Generic . List [ System . Int32 ]()
+[ ids . Add ( item . Id ) for item in geobodies ]
+tempSel . Ids = ids
+matAssignment . Location = tempSel
+matAssignment . Material = "Structural Steel"
+
+
+
+Define mesh settings
+mesh = Model . Mesh
+mesh . ElementSize = Quantity ( "25 [mm]" )
+mesh . GenerateMesh ()
+
+
+
+Define boundary conditions
+fixedSupport = analysis . AddFixedSupport ()
+fixedSupport . Location = ExtAPI . DataModel . GetObjectsByName ( "NSFixedSupportFaces" )[ 0 ]
+
+frictionlessSupport = analysis . AddFrictionlessSupport ()
+frictionlessSupport . Location = ExtAPI . DataModel . GetObjectsByName ( "NSFrictionlessSupportFaces" )[ 0 ]
+
+pressure = analysis . AddPressure ()
+pressure . Location = ExtAPI . DataModel . GetObjectsByName ( "NSInsideFaces" )[ 0 ]
+
+inputs_quantities = [ Quantity ( "0 [s]" ), Quantity ( "1 [s]" )]
+output_quantities = [ Quantity ( "0 [Pa]" ), Quantity ( "15 [MPa]" )]
+
+inputs_quantities_2 = System . Collections . Generic . List [ Ansys . Core . Units . Quantity ]()
+[ inputs_quantities_2 . Add ( item ) for item in inputs_quantities ]
+
+output_quantities_2 = System . Collections . Generic . List [ Ansys . Core . Units . Quantity ]()
+[ output_quantities_2 . Add ( item ) for item in output_quantities ]
+
+pressure . Magnitude . Inputs [ 0 ] . DiscreteValues = inputs_quantities_2
+pressure . Magnitude . Output . DiscreteValues = output_quantities_2
+
+
+
+
+Add results
+solution = analysis . Solution
+solution . AddTotalDeformation ()
+solution . AddEquivalentStress ()
+solution . EvaluateAllResults ()
+
+
+
+Save model
+
+
+
+
+Export result values to a text file
+
+
+
Total running time of the script: (0 minutes 56.337 seconds)
+
+Gallery generated by Sphinx-Gallery
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Embedding and Remote Session Example — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+ Embedding and Remote Session Example
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Embedding and Remote Session Example
+This code, which uses the same example, first demonstrates how to use
+an embedding instance and then demonstrates how to use a remote session.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Computation times — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+ Computation times
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Computation times
+00:56.337 total execution time for 1 file from examples/gallery_examples/embedding_n_remote :
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Embedding and Remote Session Example — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+ Embedding and Remote Session Example
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Embedding and Remote Session Example
+This code, which uses the same example, first demonstrates how to use
+an embedding instance and then demonstrates how to use a remote session.
+
+
+Gallery generated by Sphinx-Gallery
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Computation times — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+ Computation times
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Computation times
+00:00.000 total execution time for 0 files from examples/gallery_examples :
+
+
+
+
+
+
+
+Example
Time
Mem (MB)
+
+N/A
N/A
N/A
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Examples — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Examples
+Here are examples using Mechanical with the ansys-mechanical-core
+
+
+
+
+
+
+Embedding Examples
+
Uses PyMechanical to embed an instance of Mechanical directly within Python as a Python object.
+
+
+
+
+
+
+
+Remote Session Examples
+
Uses PyMechanical as a client to a remote Mechanical instance.
+
+
+
+
+
+
+
+
+
+
+Embedding Instance & Remote Session Example
+
Demonstrates the same model setup in both an embedded instance and remote session,
+as well as examples using a combination of embedded instances and remote sessions.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Index — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Index
+
+
+
A
+ |
C
+ |
D
+ |
E
+ |
F
+ |
G
+ |
L
+ |
M
+ |
N
+ |
P
+ |
R
+ |
S
+ |
U
+ |
V
+
+
A
+
+
+C
+
+
+D
+
+
+E
+
+
+F
+
+
+G
+
+
+L
+
+
+M
+
+
+N
+
+
+P
+
+
+R
+
+
+S
+
+
+U
+
+
+V
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ You are not viewing the most recent version of this documentation.
+ The latest stable release is 0.11
+
diff --git a/version/0.10/getting_started/docker.html b/version/0.10/getting_started/docker.html
new file mode 100644
index 000000000..41ec1b01f
--- /dev/null
+++ b/version/0.10/getting_started/docker.html
@@ -0,0 +1,821 @@
+
+
+
+
+
+
+
+ Using Mechanical through Docker — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Using Mechanical through Docker
+You can run Mechanical within a container on any operating system
+using Docker and connect to it with
+PyMechanical.
+Running Mechanical in a containerized environment like Docker or Apptainer
+(formerly Singularity) is advantageous for several reasons, including:
+
+Ability to run in a consistent environment regardless of the host operating system
Portability and ease of installation
Large-scale cluster deployment using Kubernetes
Genuine application isolation through containerization
+
+Install the Mechanical image
+There is a Docker image hosted in the PyMechanical GitHub repository that you
+can download using your GitHub credentials.
+Assuming that you have Docker installed, you can authorize Docker to access
+this repository using a GitHub personal access token with packages read Creating a personal access token .
+Save this token to a file with a command like this:
+echo XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX > GH_TOKEN . txt
+
+
This command lets you send the token to Docker without leaving the token value
+in your history.
+Next, authorize Docker to access the repository with this code:
+
+
You can now launch Mechanical directly from Docker with a short script or
+directly from the command line. Because this image does not contain a license
+server, you must enter in the IP address of your license server in the
+LICENSE_SERVER
+Launch Mechanical with this code:
+
+
Note that port 10000 10000
+As Mechanical starts, you can see status information:
+Starting the grpc server at port 10000
+Started the grpc server at port 10000
+
+
+Connect to the Mechanical container
+You can now connect to the Mechanical container with this code:
+from ansys.mechanical.core import Mechanical
+
+mechanical = Mechanical ()
+
+
If you mapped to any port other than 10000
+mechanical = Mechanical ( port = f " { my_port } " )
+
+
Verify your connection with this code:
+>>> mechanical
+Ansys Mechanical [Ansys Mechanical Enterprise]
+Product Version:231
+Software build date:Wednesday, August 10, 2022 4:28:15 PM
+
+
+
+
+Additional considerations
+You can provide additional command line parameters to Mechanical by appending them
+to the Docker command. For example, this code shows how you pass feature flags:
+
+
For additional command line arguments, see the Scripting in Mechanical Guide in the
+Ansys Help.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Frequently asked questions — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Frequently asked questions
+This section provides answers to frequently asked questions.
+
+How do you report issues?
+You can report issues with PyMechanical, such as bugs, feature requests,
+and documentation errors, on the PyMechanical repository’s Issues page.
+If you want to ask more open-ended questions or are seeking advice
+from experts in the community, you can post on this repository’s
+Discussions page.
+
+
+
+What is the relationship with Ansys Workbench?
+Ansys Workbench is a no-code environment to set up analysis systems that can be linked
+together. It is part of the Ansys family of software tools for process automation and design
+exploration. This family includes Ansys OptiSLang, which may be a more natural fit
+for integration with PyMechanical. The most popular app within the Workbench environment is
+Mechanical, and for many years, Workbench was the only environment you could run Mechanical from.
+Because Workbench is a no-code environment, a lot of the complexity around managing data
+transfer between Ansys apps and running parametric studies is hidden. PyMechanical and
+PyAnsys libraries more broadly give you much more control over your process automation and design
+exploration. However, eliminating Workbench means that you miss out on what it handled under
+the hood.
+
+
+How do you restart a script?
+If you have trouble terminating a simulation, you do not have to close Python, reopen it, and
+clear all previous data such as the mesh using this code:
+import sys
+
+sys . modules [ __name__ ] . __dict__ . clear ()
+
+
Simply exiting Python should clear the solution within Python. This is because
+stopping the original process means that nothing should be in present in
+a new process.
+The way that you clear all data from Mechanical in PyMechanical depends on if
+Mechanical is a remote session or embedded.
+
+If Mechanical is a remote session, use either the
+Mechanical.clear()
If Mechanical is embedded, use the
+app.new()
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Getting started — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+ Getting started
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Getting started
+
+
+
+
+
+
+
+
How to install and verify PyMechanical.
+
+
+
+
+
+
+
+
+
Versioning requirements and support for Ansys Mechanical.
+
+
+
+
+
+
+
+
+
+
+
+
Steps to run PyMechanical.
+
+
+
+
+
+
+
+
+
Steps for creating mechanical docker images.
+
+
+
+
+
+
+
+
+
+
+
+
How to install PyMechanical on the Linux platform using a Windows Subsystem.
+
+
+
+
+
+
+
+
+
Frequently asked questions and answers.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Installation guide — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Installation guide
+To run PyMechanical, you must have a licensed copy of Ansys Mechanical
+installed locally. The version installed dictates the interface and
+features that are available to you.
+PyMechanical is compatible with Mechanical 2023 R1 and later on Windows
+and Linux. For more information please refer to Versioning
+
+Install the package
+The latest ansys.mechanical.core
+You should consider installing PyMechanical in a virtual environment.
+For more information, see Python’s
+venv – Creation of virtual environments .
+Install the latest package from PyPi with this command:
+pip install ansys - mechanical - core
+
+
+
+Install offline
+If you want to install PyMechanical on a computer without access to the internet,
+you can download a wheelhouse archive that corresponds to your
+machine architecture from the Releases page
+of the PyMechanical repository.
+Each wheelhouse archive contains all the Python wheels necessary to install
+PyMechanical from scratch on Windows and Linux for Python 3.9 through Python 3.12. You can install
+a wheelhouse archive on an isolated system with a fresh Python installation or on a
+virtual environment.
+For example, on Linux with Python 3.9, unzip the wheelhouse archive and install it with
+this code:
+unzip ansys - mechanical - core - v0 .11 . dev0 - wheelhouse - Linux - 3.9 wheelhouse
+pip install ansys - mechanical - core - f wheelhouse -- no - index -- upgrade -- ignore - installed
+
+
If you are on Windows with Python 3.9, unzip the ansys-mechanical-core-v0.11.dev0-wheelhouse-Windows-3.9 wheelhouse pip
+
+
+Verify your installation
+The way that you verify your installation depends on whether you want to run
+Mechanical using a remote session or an embedded instance.
+Before running either, you must first verify that you can find
+the installed version of Mechanical using the ansys.tools.path
+>>> from ansys.tools.path import find_mechanical
+>>> find_mechanical ()
+
+or
+
+>>> find_mechanical ( version = 231 ) # for specific version
+
+('C:/Program Files/ANSYS Inc/v231/aisol/bin/winx64/AnsysWBU.exe', 23.1) # windows
+('/usr/ansys_inc/v231/aisol/.workbench', 23.1) # Linux
+
+
If you install Ansys in a directory other than the default or typical location,
+you can save this directory path using the save_mechanical_path get_mechanical_path version_from_path Ansys path tools
+>>> from ansys.tools.path import save_mechanical_path , find_mechanical
+>>> save_mechanical_path ( "home/username/ansys_inc/v231/aisol/.workbench" )
+>>> path = get_mechanical_path ()
+>>> print ( path )
+
+/home/username/ansys_inc/v231/aisol/.workbench
+
+>>> version = version_from_path ( "mechanical" , path )
+
+231
+
+
+Verify a remote session
+Verify your installation by starting a remote session of Mechanical from Python:
+>>> from ansys.mechanical.core import launch_mechanical
+>>> mechanical = launch_mechanical ()
+>>> mechanical
+
+Ansys Mechanical [Ansys Mechanical Enterprise]
+Product Version:231
+Software build date:Wednesday, August 10, 2022 4:28:15 PM
+
+
If you see a response from the server, you can begin using Mechanical
+as a service. For information on the PyMechanical interface, see
+PyMechanical usage
+
+
+Verify an embedded instance
+Verify your installation by loading an embedded instance of Mechanical in Python.
+
+
Note
+
If you are running on Linux, you must set some environment variables for
+embedding of Mechanical in Python to work. A script that sets these variables is
+available to install using pip:
+pip install ansys-mechanical-env
+
To use the script, prepend it to any invocation of Python:
+
+Inside of Python, use the following commands to load an embedded instance:
+>>> from ansys.mechanical.core import App
+>>> app = App ()
+>>> print ( app )
+Ansys Mechanical [Ansys Mechanical Enterprise]
+Product Version:232
+Software build date: 05/30/2023 15:25:53
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Launching PyMechanical — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Launching PyMechanical
+The ansys-mechanical-core
+
+Install Mechanical
+Mechanical is installed by default from the Ansys standard installer.
+When you run the standard installer, look under the Structural Mechanics
+heading to verify that the Mechanical Products checkbox is selected.
+Although options in the standard installer might change, this image provides
+a reference:
+
+
+
+
+Launch a remote Mechanical session
+You can use PyMechanical to launch a Mechanical session on the local machine
+Python is running on. Alternatively, you can run Mechanical’s command line
+directly on any machine to start Mechanical in server mode and then use its
+IP address to manually connect to it from Python.
+
+Launch Mechanical on the local machine using Python
+When Mechanical is installed locally on your machine, you can use the
+launch_mechanical()
+Launch Mechanical locally with this code:
+>>> from ansys.mechanical.core import launch_mechanical
+>>> mechanical = launch_mechanical ()
+>>> mechanical
+
+Ansys Mechanical [Ansys Mechanical Enterprise]
+Product Version:231
+Software build date:Wednesday, August 10, 2022 4:28:15 PM
+
+
+
+Launch Mechanical from the command line
+The ansys-mechanical utility is installed automatically with PyMechanical,
+and can be used to run Mechanical from the command line. To obtain help on
+usage, type the following command:
+$ ansys-mechanical --help
+
+Usage: ansys-mechanical [OPTIONS]
+
+ CLI tool to run mechanical.
+
+ USAGE:
+
+ The following example demonstrates the main use of this tool:
+
+ $ ansys-mechanical -r 241 -g
+
+ Starting Ansys Mechanical version 2024R1 in graphical mode...
+
+Options:
+ -h, --help Show this message and exit.
+ -p, --project-file TEXT Opens Mechanical project file (.mechdb). Cannot
+ be mixed with -i
+ --private-appdata Make the appdata folder private. This enables you
+ to run parallel instances of Mechanical.
+ --port INTEGER Start mechanical in server mode with the given
+ port number
+ -i, --input-script TEXT Name of the input Python script. Cannot be mixed
+ with -p
+ --features TEXT Beta feature flags to set, as a semicolon
+ delimited list. Options: ['MultistageHarmonic',
+ 'ThermalShells']
+ --exit Exit the application after running an input
+ script. You can only use this command with
+ --input-script argument (-i). The command
+ defaults to true you are not running the
+ application in graphical mode. The ``exit``
+ command is only supported in version 2024 R1 or
+ later.
+ -s, --show-welcome-screen Show the welcome screen. You use this screen to
+ open a file. This argument only affects the
+ application when in graphical mode.
+ --debug Show a debug dialog window at the start of the
+ process.
+ -r, --revision INTEGER Ansys Revision number, e.g. "241" or "232". If
+ none is specified, uses the default from ansys-
+ tools-path
+ -g, --graphical Graphical mode
+
+...
+
+
You can launch Mechanical in server mode from the command line and then
+manually connect to the server. Use the port argument to select the port.
+..code:
+ansys - mechanical -- port 10000
+
+
+
+Connect to a Mechanical session
+You can connect to a Mechanical session from the same host or from an external host.
+Assuming that Mechanical is running locally at the default IP address (127.0.0.1 10000
+from ansys.mechanical.core import Mechanical
+
+mechanical = Mechanical ()
+
+
Now assume that a remote instance of Mechanical has been started in server mode. To connect to
+the computer on your local area network that is running Mechanical, you can use either
+an IP address and port or a hostname and port.
+IP address and port
+Assume that Mechanical is running remotely at IP address 192.168.0.1 10000
+You would connect to it with this code:
+mechanical = Mechanical ( "192.168.0.1" , port = 10000 )
+
+
Hostname and port
+Assume that Mechanical is running remotely at hostname myremotemachine 10000
+You would connect to it with this code:
+mechanical = Mechanical ( "myremotemachine" , port = 10000 )
+
+
+
+
+Launching issues
+For any number of reasons, launching Mechanical can fail. Some approaches
+follow for debugging launch failures.
+
+Manually set the location of the executable file
+If you have a non-standard installation of Mechanical, PyMechanical might
+not be able to find your installation. In this case, you should manually
+set the location of your Mechanical executable file as the first parameter
+for the launch_mechanical()
+On Windows
+from ansys.mechanical.core import launch_mechanical
+
+exec_loc = "C:/Program Files/ANSYS Inc/v231/aisol/bin/winx64/AnsysWBU.exe"
+mechanical = launch_mechanical ( exec_loc )
+
+
On Linux
+from ansys.mechanical.core import launch_mechanical
+
+exec_loc = "/usr/ansys_inc/v231/aisol/.workbench"
+mechanical = launch_mechanical ( exec_loc )
+
+
If, when using the launch_mechanical() verbose_mechanical=True
+
+
Note
+
On Windows, output is limited because of the way Mechanical launches.
+
+
+Debug from the command line
+You may need to run the launch
+Open a terminal and run the following command:
+ansys-mechanical -g --port 10000
+
+
If the preceding command for your operating system doesn’t launch Mechanical, you might have
+a variety of issues, including:
+
+
+License server setup
Running behind a VPN
Missing dependencies
+
+
+
+
+Embed a Mechanical instance
+The instructions for embedding a Mechanical instance are different on
+Windows and Linux. While the Python code is the same in both cases,
+Linux requires some additional environment variables.
+
+Python code
+>>> from ansys.mechanical.core import App
+>>> mechanical = App ()
+>>> mechanical
+Ansys Mechanical [Ansys Mechanical Enterprise]
+Product Version:231
+Software build date:Wednesday, August 10, 2022 4:28:15 PM
+
+
+
+
+
+Licensing issues
+PADT has an Ansys
+product section. Posts about licensing are common.
+If you are responsible for maintaining an Ansys license or have a personal installation
+of Ansys, you likely can access the
+Licensing
+section of the Ansys Help, where you can view or download the Ansys, Inc. Licensing Guide for
+comprehensive licensing information.
+
+
+VPN issues
+Sometimes, Mechanical has issues starting when VPN software is running. For more information,
+access the Mechanical Users Guide
+in the Ansys Help.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Versioning — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Versioning
+PyMechanical attempts to maintain compatibility with legacy archives generated by older
+versions of Mechanical. However, PyMechanical only supports recent releases of Mechanical
+directly.
+
+PyMechanical remote sessions
+Mechanical 2023 R1 and later support the remote session interface, allowing
+for remote management of Mechanical. With the applicable license, you
+can install and use Mechanical with Docker ,
+enabling you to run and solve even on platforms that are not officially supported, like
+the Mac operating system. For more information, see Using Mechanical through Docker
+
+
+PyMechanical embedded instances
+On Windows, you can use an embedded instance in 2023 R1 and later.
+On Linux, you can use an embedded instance in 2023 R2 and later.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Windows Subsystem for Linux (WSL) — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Windows Subsystem for Linux (WSL)
+This page explains how you use a PyAnsys library, more specifically PyMechanical,
+in the Windows Subsystem for Linux (WSL). WSL is a compatibility layer for
+running Linux binary executables natively on Windows 10, Windows 11, and
+Windows Server 2019. For more information, see:
+
+This page walks you through the installation of WSL on Windows and then
+shows how to use it together with Mechanical, PyMechanical, and
+Docker .
+
+
Caution
+
These instructions have not been fully tested with a VPN connection. If you
+experience any problems connecting WSL to the internet, try to disconnect from the VPN.
+
+Run PyMechanical on WSL
+There are two versions of WSL: WSL1 and WSL2. Because WSL2 provides many improvements
+over WSL1, you should upgrade to and use WSL2.
+
+
+Install the CentOS7 WSL distribution
+You can install the CentOS7 WSL using an unofficial distribution from the
+wsldl-pg/CentWSL package or the
+mishamosher/CentOS-WSL package.
+Optionally, you can try Ubuntu, but it has not been tested yet in the context of WSL.
+
+
+Install Ansys products in WSL CentOS7
+If you are using CentOS 7, before installing Mechanical, you must install some
+required libraries:
+ yum install openssl openssh-clients mesa-libGL mesa-libGLU motif libgfortran
+
+
+
+Install Ansys products
+To install Ansys products in WSL, perform these steps:
+
+Download the Ansys Structures image for the current Ansys release from the Ansys Customer Portal.
+If you are downloading the image on a Windows machine, you should later copy the image to
+WSL.
+Extract the compressed source code file (tar.gz
+ xvzf STRUCTURES_2022R2_LINX64.tgz
+
+
To install Mechanical, go into the folder where the files have been extracted
+and run this command:
+ ./INSTALL -silent -install_dir /usr/ansys_inc/ -mechapdl
+
+
where:
+
+-silent
-install_dir /path/ -install_dir /ansys_inc /usr/ansys_inc
-<product_flag> Ansys, Inc.
+Installation Guides in the Ansys Help provides a list of valid
+values for the product_flags Chapter 6
+of the Linux Installation Guide and Chapter 7
+of the Windows Installation Guide .
+In the preceding example for Mechanical, you only need to specify the -mechapdl
+
+
+After installing Mechanical directly in /ansys_inc /usr/ansys_inc
+ ln -s /usr/ansys_inc /ansys_inc
+
+
By default, PyMechanical expects the Mechanical executable to be in
+/usr/ansys_inc /*/ansys_inc
+
+
+
+Post-installation setup
+
+Open ports for license server communication
+Theory: You should open the ports 1055 2325 Windows Control Panel . For the steps to set advanced
+Windows firewall options, see Microsoft’s How to open port in Windows 10 Firewall?
+Reality: This works if you want to run a Docker image using a WSL Linux image
+to host this Docker image. The Docker image successfully communicates with the Windows
+license server using these ports if you use the '-p' Run Mechanical on a local Docker image .
+If you want to run Mechanical in the CentOS7 image and use the Windows license
+server, opening the ports might not work properly because the Windows firewall
+seems to block all traffic coming from WSL. For security purposes, you should
+still try to open ports 1055 2325 Disable the firewall on the WSL ethernet .
+
+
+Create an environmental variable in WSL that points to the license server on the Windows host
+The IP address for the Windows host is given in the WSL /etc/hosts host.docker.internal
+
+
Note
+
This host.docker.internal
+
Here is an example of the WSL /etc/hosts
+# This file is automatically generated by WSL.
+# To stop automatic generation of this file, add the following lines to the
+# ``/etc/wsl.conf`` file:
+#
+# [network]
+# generateHosts = false
+#
+127 .0.0.1 localhost
+127 .0.1.1 AAPDDqVK5WqNLve.win.ansys.com AAPDDqVK5WqNLve
+
+192 .168.0.12 host.docker.internal
+192 .168.0.12 gateway.docker.internal
+127 .0.0.1 kubernetes.docker.internal
+
+# The following lines are desirable for IPv6 capable hosts.
+::1 ip6-localhost ip6-loopback
+fe00::0 ip6-localnet
+ff00::0 ip6-mcastprefix
+ff02::1 ip6-allnodes
+ff02::2 ip6-allrouters
+
+
You can add the next lines to your WSL ~/.bashrc
+winhostIP = $( grep -m 1 host.docker.internal /etc/hosts | awk '{print $1}' )
+export ANSYSLMD_LICENSE_FILE = 1055 @$winhostIP
+
+
+
+
+Run Mechanical on a local Docker image
+To run a Docker image, you must follow all steps in Run PyMechanical on WSL .
+Additionally, run a Docker image of PyMechanical with this command:
+docker run -e ANSYSLMD_LICENSE_FILE = 1055 @host . docker . internal - -restart always - -name mechanical -p 10000 : 10000 ghcr . io / ansys / pymechanical / mechanical > log . txt
+
+
Successive runs should restart the container. Or, delete the container and rerun it with
+this code:
+docker stop mechanical
+docker container prune
+
+docker run -e ANSYSLMD_LICENSE_FILE = 1055 @host . docker . internal - -restart always - -name mechanical -p 10001 : 10000 ghcr . io / ansys / pymechanical / mechanical > log . txt
+
+
Running a Docker image creates a log.txt
+
+
Note
+
Ensure that your port 10001
+
You should use a script file (batch .bat .ps
+Notice that the WSL internal gRPC port (10000 10001
+This image is ready to be connected to from WSL or the Windows host. However,
+you should specify the IP address and port using one of the following methods.
+Method 1
+from ansys.mechanical.core import launch_mechanical
+
+mechanical = launch_mechanical ( ip = "127.0.0.1" , port = 10001 , start_instance = False )
+
+
Method 2
+from ansys.mechanical.core import Mechanical
+
+mechanical = Mechanical ( ip = "127.0.0.1" , port = 10001 )
+
+
Method 3
+This method specifies the IP address and port using environment variables that are read when
+the Mechanical instance is launched.
+export PYMECHANICAL_START_INSTANCE = False
+export pymechanical_port = 10001
+export pymechanical_ip = 127 .0.0.1
+
+
+
+
+IP addresses in WSL and the Windows host
+Theory: You should be able to access the Windows host using the IP address
+specified in the WSL /etc/hosts 127.0.1.1 127.0.0.1
+Reality: It is almost impossible to use the IP address 127.0.1.1 host.docker.internal /etc/hosts .bashrc
+
+
+Disable the firewall on the WSL ethernet
+There are two methods for disabling the firewall on the WSL ethernet.
+Method 1
+This method shows a notification:
+Set-NetFirewallProfile -DisabledInterfaceAliases "vEthernet (WSL)"
+
+
Method 2
+This method does not show a notification:
+powershell . exe -Command "Set-NetFirewallProfile -DisabledInterfaceAliases \" vEthernet ( WSL )\ ""
+
+
On Windows 10, you can use the wsl-windows-toolbar-launcher
+package to launch Linux native apps directly from Windows with the standard
+Windows toolbar. Because the toolbar in Windows 11 differs, the README
+file for this package explains how to run Microsoft’s PowerToys
+package instead.
+
+
+Port forwarding on Windows 10
+You can use Windows PowerShell commands for port forwarding on Windows 10.
+
+Link ports between WSL and Windows
+This command links ports between WSL and Windows:
+netsh interface portproxy add v4tov4 listenport = 1055 listenaddress = 0 . 0 . 0 . 0 connectport = 1055 connectaddress = XXX . XX . XX . XX
+
+
+
+View all forwards
+This command allows you to view all forwards:
+netsh interface portproxy show v4tov4
+
+
+
+Delete port forwarding
+This command allows you to delete port forwarding:
+netsh interface portproxy delete v4tov4 listenport = 1055 listenaddres = 0 . 0 . 0 . 0 protocol = tcp
+
+
+
+
+Reset Windows network adapters
+You can reset Windows network adapters with this code:
+netsh int ip reset all
+netsh winhttp reset proxy
+ipconfig / flushdns
+netsh winsock reset
+
+
+
+Restart the WSL service
+You can restart the WSL service with this command:
+Get-Service LxssManager | Restart-Service
+
+
+
+Stop all processes with a given name
+You can stop all processes with a given name with this command.
+Get-Process "AnsysWBU" | Stop-Process
+
+
+
+Install xvfb
+If you want to replicate the CI/CD behavior, you must install the xvfb .ci
+ install xorg-x11-server-Xvfb
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Introduction — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Introduction
+PyMechanical is part of the larger PyAnsys
+effort to facilitate the use of Ansys technologies directly from
+Python. Its primary package, ansys-mechanical-core
+With PyMechanical, you can integrate the simulation capabilities
+of the Mechanical multiphysics solver directly into novel apps.
+The ansys-mechanical-core
+With PyMechanical, you can accomplish tasks like these:
+
+Accelerate the preparation of your simulations.
Combine the expressiveness of general-purpose Python code to control
+the flow in your input decks with methods that drive the solver.
Explore proof-of-concept studies or capture knowledge using interactive
+Jupyter notebooks.
Tap the solver as the physics engine in your next AI app.
+Contributions to this open source library are welcome. For more information,
+see Contribute
+
+
+Mechanical scripting
+You can already perform scripting of Mechanical with Python from inside
+Mechanical. PyMechanical leverages the same APIs as Mechanical but allows
+you to run your automation from outside Mechanical. For more information
+on using these APIs, see Mechanical scripting
+
+
+Background
+PyMechanical contains two interfaces: a remote session and an embedded instance.
+For information on the application architecture of Mechanical and why there are
+two Python interfaces, see PyMechanical architecture
+
+Remote session
+PyMechanical’s remote session is based on gRPC .
+Mechanical runs as a server, ready to respond to any clients.
+PyMechanical provides a client to connect to a Mechanical server and make API
+calls to this server.
+For information on using a remote session, see
+Remote sessions
+
+
+Embedded instance
+PyMechanical’s embedded instance is based on Python.NET .
+Rather than starting a new process for Mechanical, a Mechanical object (which is
+implemented in .NET) is directly loaded into Python memory using Python.NET. From
+there, Mechanical’s entire data model is available for use from Python code.
+For information on using an embedded instance, see Embedded instances
+
+
+
+Documentation and issues
+Documentation for the latest stable release of PyMechanical is hosted at PyMechanical documentation .
+In the upper right corner of the documentation’s title bar, there is an option for switching from
+viewing the documentation for the latest stable release to viewing the documentation for the
+development version or previously released versions.
+You can also view or
+download the
+PyMechanical cheat sheet. This one-page reference provides syntax rules and commands
+for using PyMechanical.
+On the PyMechanical Issues page,
+you can create issues to report bugs and request new features. On the PyMechanical Discussions page or the Discussions
+page on the Ansys Developer portal, you can post questions, share ideas, and get community feedback.
+To reach the project support team, email pyansys. core@ ansys. com .
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
— PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Search
+
+
+
+
+
+
+
+
+
+
+
+
+
Computation times — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+ Computation times
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Computation times
+00:56.337 total execution time for 1 file from all galleries :
+
+
+
+
+
+
+
+Example
Time
Mem (MB)
+
+Remote & Embedding Example ../../examples/embedding_n_remote/embedding_remote.py
00:56.337
0.0
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ You are not viewing the most recent version of this documentation.
+ The latest stable release is 0.11
+
diff --git a/version/0.10/user_guide_embedding/configuration.html b/version/0.10/user_guide_embedding/configuration.html
new file mode 100644
index 000000000..c4e8b8216
--- /dev/null
+++ b/version/0.10/user_guide_embedding/configuration.html
@@ -0,0 +1,737 @@
+
+
+
+
+
+
+
+ Addin configuration — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Addin configuration
+There are some configuration options that are respected when loading an embedded instance
+of Mechanical into python.
+The class Configuration Configuration
+For example, to load an instance of Mechanical using the “Mechanical” configuration name and
+without loading any ACT Addins:
+from ansys.mechanical.core import App
+from ansys.mechanical.core.embedding import AddinConfiguration
+
+config = AddinConfiguration ( "Mechanical" )
+config . no_act_addins = True
+app = App ( config = config )
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Globals — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Globals
+When using Mechanical scripting APIs (in either Mechanical’s graphical user interface or when
+sending scripts to a remote session of Mechanical), there are many global variables that are
+by default usable from Python. Some of these are API entry points, like those discussed in
+Mechanical scripting Quantity Transaction DataModel
+Embedding Mechanical into Python is as simple as constructing an application object. This can
+not automatically change the global variables available to the Python scope that constructed
+it. As a utility, a function that adds the API entry points is available. To use it, run the
+following code:
+from ansys.mechanical.core import App , global_variables
+
+app = App ()
+# The following line extracts the global API entry points and merges them into your global
+# Python global variables.
+globals () . update ( global_variables ( app ))
+
+
Some enum types are available when scripting inside of mechanical, such as SelectionTypeEnum LoadDefineBy global_variables
+globals () . update ( global_variables ( app , True ))
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Embedded instances — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+ Embedded instances
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Embedded instances
+This section provides an overview of how you use PyMechanical to embed
+an instance of Mechanical in Python.
+
+
+
+Overview
+The Application
+from ansys.mechanical.core import App
+
+app = App ()
+ns = app . DataModel . Project . Model . AddNamedSelection ()
+
+
The Application
+
+ExtAPI: Application.ExtAPI
DataModel: Application.DataModel
Model: Application.DataModel.Project.Model
Tree: Application.DataModel.Tree
Graphics: Application.ExtAPI.Graphics
+Besides scripting entry points, many other types and objects are available from
+built-in Mechanical scripting. To learn how to import scripting entry points,
+namespaces, and types, see Globals
+
+
+Additional configuration
+By default, an instance of the Application Addin configuration
+
+
+Diagnosing problems with embedding
+In some cases, debugging the embedded Mechanical instance may require additional logging.
+For information on how to configure logging, see Logging
+
+
+Running PyMechanical embedding scripts inside Mechanical with IronPython
+If your PyMechanical embedding script does not use any other third-party Python package, such as NumPy ,
+it is possible to adapt it so that it can run inside of Mechanical with IronPython.
+The scripting occurs inside Mechanical’s command line interface. For instance, consider the following PyMechanical code:
+from ansys.mechanical.core import App , global_variables
+
+app = App ()
+globals () . update ( global_variables ( app ))
+ns = DataModel . Project . Model . AddNamedSelection ()
+ns . Name = "Jarvis"
+
+
The above code can be written as a Python file, such as file.py
+ns = DataModel . Project . Model . AddNamedSelection ()
+ns . Name = "Jarvis"
+
+
Because the file does not contain the PyMechanical import statements, you can run
+file.py
+Using command line interface (CLI)
+This can be achieved on both the Windows and Linux platforms using
+ansys-mechanical ansys-mechanical-core -r -h
+ansys - mechanical - i file . py
+
+
+
Note
+
Alternately user can use the following commands in the command prompt of Windows and the terminal
+for Linux systems.
+
On Windows
+
"C:/Program Files/ANSYS Inc/v241/aisol/bin/winx64/AnsysWBU.exe -DSApplet -AppModeMech -script file.py"
+
+
+
PowerShell users can run the preceding command without including the opening and
+closing quotation marks.
+
On Linux
+
/ usr / ansys_inc / v231 / aisol /. workbench - DSApplet - AppModeMech - nosplash - notabctrl - script file . py
+
+
+
-nosplash -notabctrl
+
On either Windows or Linux, add the command line argument -b
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Libraries — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Libraries
+
+
Note
+
This is an experimental feature. Some of these libraries may not work.
+
Most of Mechanical’s scripting APIs are implemented in C#. However, there are a small number
+of Python modules that are distributed with the installation of Mechanical that can be used
+from within the Mechanical Scripting Pane. These modules are not available for use from an
+embedded instance of Mechanical in Python because Python does not know where to find them.
+But, in order to use these modules, you need to use the experimental function
+add_mechanical_python_libraries
+To use the above function, run the following:
+from ansys.mechanical.core import App , global_variables
+from ansys.mechanical.core.embedding import add_mechanical_python_libraries
+
+app = App ( version = 241 )
+
+add_mechanical_python_libraries ( app )
+import materials # This is materials.py that's shipped with Mechanical v241
+
+
+
Warning
+
Using version as argument to add_mechanical_python_libraries()
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Logging — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Logging
+Mechanical has a logging system that is useful when debugging issues. Normally, it is
+enabled by setting environment variables before starting Mechanical. With PyMechanical,
+it is possible to configure logging at any time, whether it is before or after creating
+the embedded application, using the same Python API.
+Use the Configuration
+import logging
+import ansys.mechanical.core as mech
+from ansys.mechanical.core.embedding.logger import Configuration , Logger
+
+Configuration . configure ( level = logging . WARNING , to_stdout = True )
+_ = mech . App ()
+
+
After the embedded application has been created, you can write messages to the same
+log using the Logger
+from ansys.mechanical.core.embedding.logger import Logger
+
+Logger . error ( "message" )
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ You are not viewing the most recent version of this documentation.
+ The latest stable release is 0.11
+
diff --git a/version/0.10/user_guide_scripting/index.html b/version/0.10/user_guide_scripting/index.html
new file mode 100644
index 000000000..c70370556
--- /dev/null
+++ b/version/0.10/user_guide_scripting/index.html
@@ -0,0 +1,802 @@
+
+
+
+
+
+
+
+ Mechanical scripting — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+ Mechanical scripting
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Mechanical scripting
+This section provides an overview of Mechanical scripting.
+
+
+
+Overview
+You could already perform scripting of Mechanical with Python from inside
+Mechanical. PyMechanical leverages the same APIs but allows you to run your
+automation from outside Mechanical.
+For comprehensive information on these APIs, see the Scripting in Mechanical Guide in the
+Ansys Help.
+
+
+Recording
+Mechanical supports some level of recording. When you initiate an action from the user
+interface (UI), the UI determines what API to run, executes this API, and prints it in the Mechanical Scripting
+View . Examples of these actions are assigning selections to scoping, changing values in
+the details view, and renaming an object in the Outline . In the following animated example,
+a Fixed Support and a Pressure are added to the Outline .
+
+
+
+
+Mechanical entities
+Mechanical has an extensive set of entities that represent all the functionality provided
+by Mechanical. Here are descriptions of the entities at Mechanical’s core:
+
+CAD: CAD entities, which are usually imported from a CAD application
Mesh: The discretized geometry that is appropriate for Mechanical’s solvers
Materials: Engineering material models that come from Engineering Data , which is a subsystem of Ansys Workbench
Objects: The entities in the Outline that represent the model, analyses, solutions, and results
Graphics: The 3D graphics engine that renders data from Mechanical visually and can export images and animations
Solvers: The solver integrations that allow a Mechanical model to be used to run a specific solver
Post: The engine that computes useful engineering results from solver runs
Extensions: Plugins or extensions defined externally from Mechanical that extend Mechanical
+There is some overlap between these entities. For instance, the CAD data is represented visually in the 3D graphics
+engine but also has representation in the Outline . The raw CAD data, which includes the tessellations used to render the
+graphics and all the data needed to define vertices, edges, faces, volumes, and parts is collectively considered GeoData Outline , assigning materials, thickness, and other data that does
+not come from CAD entities. This is considered Geometry GeoData Geometry
+The same is true for Mesh Outline that contains the settings
+used to generate the mesh and statistics about the mesh. Then, there is MeshData
+Executing a sequence of APIs can sometimes be slow because Mechanical may perform background tasks each time any of its
+entities are created, updated, or deleted. Mechanical scripting has a Transaction
+with Transaction ():
+ for obj in Tree :
+ obj . Name = obj . Name + " suffix"
+
+
+
+API entry points
+When running scripts inside of Mechanical, you can access the APIs via these entry points:
+
+ExtAPI
DataModel Outline
Model Outline
Tree Outline
Graphics
+You also have access to several types and namespaces that are included in the scripting scope but are not available
+from those entry points.
+
+
+Additional resources
+The ACT API Reference Guide
+provides descriptions of the objects, methods, and properties for all namespaces.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Threading — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Threading
+
+Concurrency and threads
+
+
Note
+
The intent is not to provide an extensive explanation of concurrency and threads but
+rather to lay the groundwork for specific concurrency considerations for Mechanical’s
+scripting API. Some simplifications are employed for this purpose.
+
CPUs can execute multiple subroutines of a program concurrently. One popular model
+for this concurrency is called threading . There are other possible models, such
+as co-routines.
+A thread is a CPU virtualization of a CPU core. Traditionally, a computer can have
+multiple CPUs, each executing multiple programs concurrently. Using clever scheduling,
+a CPU can simulate more cores than it actually has. A thread is an abstraction around
+either a CPU core executing a program or a virtual CPU core executing a program. Within
+a single process, there can be multiple threads running, and these threads can be
+executing in a single core or multiple cores.
+In a traditional computer instruction set architecture, memory is a store of data that
+stores the program itself and data used by the program. CPUs contain a small amount of
+memory that can be used to run a program, but often times an external memory store,
+typically using RAM, is used by the program. Frequently, when running a program, the
+CPU needs to fetch data from RAM or store data back into RAM.
+CPUs operate at the speed of electrons and can often do trillions of operations per
+second. If there is only one program running on a CPU and a private section of memory
+that the program needs, it can shuttle data to and from that memory extremely quickly.
+When there are multiple programs or threads running on a CPU, things can get tricker.
+Consider a (contrived) example with a simple program that increments an integer:
+
+If i 00000000 00000000 00000000 00001011 00000000 00000000 00000000 00001100
+Now consider that two concurrently running threads are both trying to increment this integer
+at roughly the same time, at the time scale of CPUs. The first thread flips one of
+the bits, making the binary value 00000000 00000000 00000000 00001111 00000000 00000000 00000000 00001111 00000000 00000000 00000000 00010000 00000000 00000000 00000000 00010111
+
+Race condition
+This preceding situation is called a race condition , where concurrent programs are incorrectly
+accessing or mutating the same memory in such a way that leads to surprising consequences. They may
+seem rare. However, remember that when a CPU situation has a probability of one in a million, it is
+likely to occur hundreds of times per second. If it has a much smaller probability than that, it can
+occur once every few days or once every few weeks. In the Therac-25 radiation machine, a race
+condition actually led to three deaths and more debilitating injuries.
+
+
+Mitigation strategies
+There are a number of strategies that software engineers use to benefit from the enhanced
+performance of concurrent programs without suffering from race conditions:
+
+Data copies: Algorithms operate on private copies of data, rather than shared memory.
Thread-compatible data structures: These data structures are designed to allow for
+concurrent read-only access of data but not concurrent write access to data.
Thread-safe data structures: These data structures allow both concurrent read and write
+access to data.
Task posting: All calls to a set of functions implicitly schedule the function to run on a
+dedicated thread, allowing two calls to any of these functions to run concurrently.
+Adopting any of these strategies comes with a tradeoff. Namely, these strategies typically
+ask the CPU to do additional work in form of memory walls, mutexes, and other low-level
+CPU-intrinsic functions. Or, they require the program to do additional work in scheduling
+tasks. Usually, these are performance pessimizations for the 99% of cases where
+concurrency is not needed. As such, adopting these strategies causes performance
+problems for the typical user.
+
+
+
+Mechanical’s threading model
+Mechanical is a large-scale application with multiple concurrent threads running at
+any one time. However, it exhibits thread affinity , where a single thread is privileged above
+all others with respect to data access and mutation. If the user interface (UI) is running,
+this thread is typically called the UI thread, and in batch mode, it is typically called the
+main thread. Some of the data structures used by Mechanical’s code are thread-compatible.
+Some of the APIs use task posting. However, in the general case, using any Mechanical
+API on a non-privileged thread carries a risk of race conditions . It is difficult to quantify
+the risk or to distinguish which operations are most likely to be vulnerable to them due to
+the large scale of the Mechanical application’s code.
+As such, Mechanical APIs MUST only be run on the UI thread or main thread, in interactive and batch
+mode respectively. For PyMechanical, this means the following:
+
+For an embedded instance, all scripting APIs are executed on the Python thread that constructed
+the instance of Mechanical.
For a remote session, the Python code that is sent to the server does not contain threading
+constructs that try to run APIs in a background thread.
+Given the preceding restrictions, it is possible to offload some work to a background
+thread, as long as that thread does not access Mechanical’s scripting API.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ You are not viewing the most recent version of this documentation.
+ The latest stable release is 0.11
+
diff --git a/version/0.10/user_guide_session/index.html b/version/0.10/user_guide_session/index.html
new file mode 100644
index 000000000..9cda2313a
--- /dev/null
+++ b/version/0.10/user_guide_session/index.html
@@ -0,0 +1,771 @@
+
+
+
+
+
+
+
+ Remote sessions — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+ Remote sessions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Remote sessions
+This section provides an overview of how you use PyMechanical as a client
+to a remote Mechanical session.
+
+
+
+Overview
+The launch_mechanical() Mechanical
+Here is how you use the launch_mechanical()
+import os
+from ansys.mechanical.core import launch_mechanical
+
+mechanical = launch_mechanical ()
+
+
When Mechanical is active, you can send commands to it as a genuine
+Python class. For example, you can send a Python script:
+result = mechanical . run_python_script ( "2+3" )
+result = mechanical . run_python_script ( "ExtAPI.DataModel.Project.ProjectDirectory" )
+
+
Mechanical interactively returns the result of each command that you send,
+saving the result to the logging module.
+Errors are caught immediately. In the following code, an invalid command is sent,
+and an error is raised:
+>>> mechanical . run_python_script ( "2****3" )
+grpc.RpcError:
+"unexpected token '**'"
+
+
Because the error is caught immediately, you can write your Mechanical scripts in
+Python, run them interactively, and then run them in batch without worrying if the
+scripts run correctly. This would not be the case if you had instead outputted the
+scripts that you wrote to script files.
+The Mechanical Examples
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
PyMechanical usage — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+PyMechanical usage
+This page provides an overview of the
+Mechanical
+For more information on this class, see Mechanical
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Create a pool of Mechanical servers — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Create a pool of Mechanical servers
+The LocalMechanicalPool Mechanical
+This code shows how to create a pool with 10 instances:
+>>> from ansys.mechanical.core import LocalMechanicalPool
+>>> pool = LocalMechanicalPool ( 10 , version = "231" )
+'Mechanical Pool with 10 active instances'
+
+
When you are creating a pool, you can supply additional keyword arguments.
+For example, to restart failed instances, you can set restart_failed=True
+>>> import os
+>>> my_path = os . getcmd ()
+>>> pool = LocalMechanicalPool ( 10 , version = "231" , restart_failed = True )
+Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+
You can access each individual instance of Mechanical with this code:
+>>> pool [ 0 ]
+<ansys.mechanical.core.mechanical.Mechanical at 0x7fabf0230d90>
+
+
Because this is a self-healing pool , if an instance of Mechanical stops
+during a batch process, this instance is automatically restarted. When creating
+the pool, you can disable this behavior by setting restart_failed=False
+
+
+Run a user-defined function
+While the previous example uses the run_batch() map()
+>>> completed_indices = []
+>>> def func ( mechanical , input_file , index ):
+... # input_file, index = args
+... mechanical . clear ()
+... output = mechanical . run_python_script_from_file ( input_file )
+... completed_indices . append ( index )
+... return output
+...
+>>> inputs = [( "test {index} .py" , i ) for i in range ( 1 , 10 )]
+>>> output = pool . map ( func , inputs , progress_bar = True , wait = True )
+['result1',
+ 'result2',
+ 'result3',
+ 'result4',
+ 'result5',
+ 'result6',
+ 'result7',
+ 'result8',
+ 'result9']
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Initial setup for launching a Mechanical session on the local machine — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ PyAnsys
+
+
+
+
+
+
+
+
+ Remote sessions
+
+
+ Initial setup for launching a Mechanical session on the local machine
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Initial setup for launching a Mechanical session on the local machine
+To run, PyMechanical must know the location of your Mechanical installation.
+Most of the time, PyMechanical can determine this location automatically. However,
+if you have a non-standard installation, you must provide this location.
+To test and set up your installation of PyMechanical, run the
+launch_mechanical()
+from ansys.mechanical.core import launch_mechanical
+
+mechanical = launch_mechanical ()
+
+
The first time that you run this method, PyMechanical attempts to detect the location
+of your Mechanical installation based on environment variables. If it cannot find
+a Mechanical installation, PyMechanical asks you to supply the location of the
+Mechanical executable file.
+On Linux
+Enter location of Mechanical executable : / usr / ansys_inc / v231 / aisol /. workbench
+
+
On Windows
+Enter location of Mechanical executable : C : / Program Files / ANSYS Inc / v231 / aisol / bin / winx64 / AnsysWBU . exe
+
+
The settings file for Mechanical is stored locally. You do not need to enter
+the path again. If you must change the path, perhaps to change the default
+version of Mechanical, run the following:
+from ansys.mechanical import core as pymechanical
+
+new_path = "C:/Program Files/ANSYS Inc/v231/aisol/bin/winx64/AnsysWBU.exe"
+pymechanical . change_default_mechanical_path ( new_path )
+
+
For more information, see the change_default_mechanical_path() find_mechanical()
+Additionally, you can use the exec_file
+On Linux
+from ansys.mechanical.core import launch_mechanical
+
+mechanical = launch_mechanical ( exec_file = "/usr/ansys_inc/v231/aisol/.workbench" )
+
+
On Windows
+from ansys.mechanical.core import launch_mechanical
+
+mechanical = launch_mechanical (
+ exec_file = "C: \\ Program File \\ ANSYS Inc \\ v231 \\ aisol \\ bin \\ winx64 \\ AnsysWBU.exe"
+)
+
+
You can use the additional_switches
+from ansys.mechanical.core import launch_mechanical
+
+custom_exec = "/usr/ansys_inc/v231/aisol/.workbench"
+add_switch = f "-featureflags mechanical.material.import;"
+mechanical = launch_mechanical ( additional_switches = add_switch )
+
+
+API reference
+For more information on controlling how Mechanical launches locally, see the
+launch_mechanical()
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Oops — PyMechanical
+
+
+
+
+
+
+
+ Skip to main content
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Oops
+This is unexpected.
+The page you are requesting does not exist.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
`, :obj:`optional`
+ Whether to write log messages to the standard output, which is the
+ command line. The default is ``True``.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: set_log_to_stdout(value: bool) -> None
+ :classmethod:
+
+
+
+ Configure logging to write to the standard output.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: set_log_to_file(value: bool) -> None
+ :classmethod:
+
+
+
+ Configure logging to write to a file.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: set_log_level(level: int) -> None
+ :classmethod:
+
+
+
+ Set the log level for all configured sinks.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: set_log_directory(value: str) -> None
+ :classmethod:
+
+
+
+ Configure logging to write to a directory.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: set_log_base_directory(directory: str) -> None
+ :classmethod:
+
+
+
+ Configure logging to write in a time-stamped subfolder in this directory.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/embedding/logger/Logger.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/embedding/logger/Logger.rst.txt
new file mode 100644
index 000000000..d8272e2f1
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/embedding/logger/Logger.rst.txt
@@ -0,0 +1,264 @@
+.. vale off
+
+
+
+:class:`Logger`
+===============
+
+.. py:class:: ansys.mechanical.core.embedding.logger.Logger
+
+
+ Provides the ``Logger`` class for embedding.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+
+
+
+
+
+
+.. py:currentmodule:: Logger
+
+Overview
+--------
+
+.. tab-set::
+
+
+ .. tab-item:: Constructors
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+ * - :py:attr:`~flush`
+ - Flush the log.
+ * - :py:attr:`~can_log_message`
+ - Get whether a message at this level is logged.
+ * - :py:attr:`~debug`
+ - Write a debug message to the log.
+ * - :py:attr:`~error`
+ - Write a error message to the log.
+ * - :py:attr:`~info`
+ - Write an info message to the log.
+ * - :py:attr:`~warning`
+ - Write a warning message to the log.
+ * - :py:attr:`~fatal`
+ - Write a fatal message to the log.
+
+
+
+
+
+
+
+
+
+Import detail
+-------------
+
+ from ansys.mechanical.core.embedding.logger import Logger
+
+
+
+
+
+Method detail
+-------------
+.. py:method:: flush()
+ :classmethod:
+
+
+
+ Flush the log.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: can_log_message(level: int) -> bool
+ :classmethod:
+
+
+
+ Get whether a message at this level is logged.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: debug(msg: str)
+ :classmethod:
+
+
+
+ Write a debug message to the log.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: error(msg: str)
+ :classmethod:
+
+
+
+ Write a error message to the log.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: info(msg: str)
+ :classmethod:
+
+
+
+ Write an info message to the log.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: warning(msg: str)
+ :classmethod:
+
+
+
+ Write a warning message to the log.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: fatal(msg: str)
+ :classmethod:
+
+
+
+ Write a fatal message to the log.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/embedding/logger/environ/EnvironBackend.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/embedding/logger/environ/EnvironBackend.rst.txt
new file mode 100644
index 000000000..cd2f8e6a2
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/embedding/logger/environ/EnvironBackend.rst.txt
@@ -0,0 +1,296 @@
+.. vale off
+
+
+
+:class:`EnvironBackend`
+=======================
+
+.. py:class:: ansys.mechanical.core.embedding.logger.environ.EnvironBackend
+
+
+ Provides the environment variable backend for Mechanical logging.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+.. py:currentmodule:: EnvironBackend
+
+Overview
+--------
+
+.. tab-set::
+
+
+
+ .. tab-item:: Methods
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+ * - :py:attr:`~flush`
+ - Flush the log.
+ * - :py:attr:`~enable`
+ - Enable the given sink.
+ * - :py:attr:`~disable`
+ - Disable the log level for this sink.
+ * - :py:attr:`~set_log_level`
+ - Set the log level for this sink based on the Python log level.
+ * - :py:attr:`~set_auto_flush`
+ - Set whether to auto flush to the standard log file.
+ * - :py:attr:`~set_directory`
+ - Set the location to write the log file to.
+ * - :py:attr:`~set_base_directory`
+ - Set the base location to write the log file to.
+ * - :py:attr:`~can_log_message`
+ - Return whether a message with the given severity is outputted to the log.
+ * - :py:attr:`~log_message`
+ - Log the message to the configured logging mechanism.
+
+
+
+
+
+
+
+
+Import detail
+-------------
+
+ from ansys.mechanical.core.embedding.logger.environ import EnvironBackend
+
+
+
+
+
+Method detail
+-------------
+.. py:method:: flush()
+
+
+ Flush the log.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: enable(sink: int = sinks.StandardSinks.CONSOLE)
+
+
+ Enable the given sink.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: disable(sink: int = sinks.StandardSinks.CONSOLE)
+
+
+ Disable the log level for this sink.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: set_log_level(level: int, sink: int = sinks.StandardSinks.CONSOLE)
+
+
+ Set the log level for this sink based on the Python log level.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: set_auto_flush(flush: bool) -> None
+
+
+ Set whether to auto flush to the standard log file.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: set_directory(directory: str) -> None
+
+
+ Set the location to write the log file to.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: set_base_directory(base_directory: str) -> None
+
+
+ Set the base location to write the log file to.
+
+ The base directory contains time-stamped subfolders where the log file
+ is actually written to. If a base directory is set, it takes precedence over the
+ ``set_directory`` location.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: can_log_message(level: int) -> bool
+
+
+ Return whether a message with the given severity is outputted to the log.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: log_message(level: int, context: str, message: str) -> None
+
+
+ Log the message to the configured logging mechanism.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/embedding/logger/environ/index.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/embedding/logger/environ/index.rst.txt
new file mode 100644
index 000000000..d2e842575
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/embedding/logger/environ/index.rst.txt
@@ -0,0 +1,84 @@
+.. vale off
+
+
+
+
+
+
+
+The ``environ.py`` module
+=========================
+
+.. py:module:: ansys.mechanical.core.embedding.logger.environ
+
+
+Summary
+-------
+
+
+
+
+
+
+
+
+
+
+.. py:currentmodule:: environ
+.. tab-set::
+
+
+
+
+ .. tab-item:: Classes
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~ansys.mechanical.core.embedding.logger.environ.EnvironBackend`
+ - Provides the environment variable backend for Mechanical logging.
+
+
+
+
+
+
+
+
+
+
+
+
+.. toctree::
+ :titlesonly:
+ :maxdepth: 1
+ :hidden:
+
+ `
+ ``True`` if delete_downlaods succeeds, ``False`` otherwise.
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Delete all downloaded examples
+
+ >>> from ansys.mechanical.core import examples
+ >>> return_value = examples.delete_downloads()
+ >>> return_value
+ 'True'
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/examples/index.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/examples/index.rst.txt
new file mode 100644
index 000000000..457a296d7
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/examples/index.rst.txt
@@ -0,0 +1,96 @@
+.. vale off
+
+
+
+
+
+
+
+The ``examples`` package
+============================
+
+.. py:module:: ansys.mechanical.core.examples
+
+
+Summary
+-------
+
+
+
+
+
+
+
+
+.. py:currentmodule:: examples
+.. tab-set::
+
+
+ .. tab-item:: Submodules
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~ansys.mechanical.core.examples.downloads`
+ - Functions to download sample datasets from the PyAnsys data repository.
+
+
+
+
+
+
+
+
+
+
+
+
+.. toctree::
+ :titlesonly:
+ :maxdepth: 1
+ :hidden:
+
+ `, :obj:`optional`
+ Whether to write log messages to a file. The default is ``False``.
+
+ **to_stdout** : :ref:`bool `, :obj:`optional`
+ Whether to write log messages to the standard output. The default is
+ ``True``.
+
+ **filename** : :class:`python:str`, :obj:`optional`
+ Name of the file to write log messages to. The default is ``pymechanical.log``.
+
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Demonstrate logger usage from a Mechanical instance. The logger is automatically
+ created when a Mechanical instance is created.
+
+ >>> from ansys.mechanical.core import launch_mechanical
+ >>> mechanical = launch_mechanical(loglevel='DEBUG')
+ >>> mechanical.log.info('This is a useful message')
+ INFO - - - - This is LOG debug message.
+
+ Import the PyMechanical global logger and add a file output handler.
+
+ >>> import os
+ >>> from ansys.mechanical.core import LOG
+ >>> file_path = os.path.join(os.getcwd(), 'pymechanical.log')
+ >>> LOG.log_to_file(file_path)
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+
+.. py:currentmodule:: Logger
+
+Overview
+--------
+
+.. tab-set::
+
+
+
+ .. tab-item:: Methods
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+ * - :py:attr:`~log_to_file`
+ - Add a file handler to the logger.
+ * - :py:attr:`~log_to_stdout`
+ - Add a standard output handler to the logger.
+ * - :py:attr:`~setLevel`
+ - Change the log level of the object and the attached handlers.
+ * - :py:attr:`~add_child_logger`
+ - Add a child logger to the main logger.
+ * - :py:attr:`~add_instance_logger`
+ - Add a logger for a Mechanical instance.
+
+
+
+ .. tab-item:: Attributes
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+ * - :py:attr:`~file_handler`
+ -
+ * - :py:attr:`~std_out_handler`
+ -
+
+
+ .. tab-item:: Static methods
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+ * - :py:attr:`~add_handling_uncaught_exceptions`
+ - Redirect the output of an exception to a logger.
+
+
+ .. tab-item:: Special methods
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+ * - :py:attr:`~__getitem__`
+ - Get the instance logger based on a key.
+
+
+
+
+Import detail
+-------------
+
+ from ansys.mechanical.core.logging import Logger
+
+
+
+Attribute detail
+----------------
+.. py:attribute:: file_handler
+ :value: None
+
+
+.. py:attribute:: std_out_handler
+ :value: None
+
+
+
+
+Method detail
+-------------
+.. py:method:: log_to_file(filename=FILE_NAME, level=LOG_LEVEL)
+
+
+ Add a file handler to the logger.
+
+
+ :Parameters:
+
+ **filename** : :class:`python:str`, :obj:`optional`
+ Name of the file to write log messages to. The default is
+ ``'pymechanical.log'``.
+
+ **level** : :class:`python:str`, :obj:`optional`
+ Level of logging. The default is ``10``, in which case the ``"DEBUG"``
+ level is used. Options are ``"DEBUG"``, ``"INFO"``,
+ ``"WARNING"`` and ``"ERROR"``.
+
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Write to the ``pymechanical.log`` file in the current working directory.
+
+ >>> from ansys.mechanical.core import LOG
+ >>> import os
+ >>> file_path = os.path.join(os.getcwd(), 'pymechanical.log')
+ >>> LOG.log_to_file(file_path)
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: log_to_stdout(level=LOG_LEVEL)
+
+
+ Add a standard output handler to the logger.
+
+
+ :Parameters:
+
+ **level** : :class:`python:str`, :obj:`optional`
+ Level of logging, such as ``DUBUG``. The default is ``LOG_LEVEL``.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: setLevel(level='DEBUG')
+
+
+ Change the log level of the object and the attached handlers.
+
+
+ :Parameters:
+
+ **level** : :class:`python:str`, :obj:`optional`
+ Level of logging, such as ``DUBUG``. The default is ``LOG_LEVEL``.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: add_child_logger(suffix, level=None)
+
+
+ Add a child logger to the main logger.
+
+ This child logger is more general than an instance logger, which is designed to
+ track the state of a Mechanical instance.
+
+ If the logging level is specified in the arguments, a new logger with a reference
+ to the ``_global`` logger handlers is created instead of a child logger.
+
+ :Parameters:
+
+ **suffix** : :class:`python:str`
+ Name for the child logger.
+
+ **level** : :class:`python:str`, :obj:`optional`
+ Level of logging. The default is ``None``, in which case the ``"DEBUG"``
+ level is used. Options are ``"DEBUG"``, ``"INFO"``, ``"WARNING"``,
+ and ``"ERROR"``.
+
+ :Returns:
+
+ :obj:`logging.logger`
+ Logger class.
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: add_instance_logger(name, mechanical_instance, level=None)
+
+
+ Add a logger for a Mechanical instance.
+
+ The logger for a Mechanical instance has an adapter that adds contextual information,
+ such as the name of the Mechanical instance. This logger is returned, and you can use it to
+ log events as a normal logger. It is also stored in the ``_instances`` field.
+
+ :Parameters:
+
+ **name** : :class:`python:str`
+ Name for the new logger.
+
+ **mechanical_instance** : :obj:`ansys.mechanical.core.mechanical.Mechanical`
+ Mechanical instance object. This object should contain the ``name``
+ attribute.
+
+ **level** : :class:`python:str`, :obj:`optional`
+ Level of logging. The default is ``None``, in which case the ``"DEBUG"``
+ level is used. Options are ``"DEBUG"``, ``"INFO"``, ``"WARNING"``,
+ and ``"ERROR"``.
+
+ :Returns:
+
+ :obj:`ansys.mechanical.core.logging.PyMechanicalCustomAdapter`
+ Logger adapter customized to add Mechanical information to the
+ logs. You can use this class to log events in the same
+ way you would with the ``logger`` class.
+
+
+
+
+ :Raises:
+
+ :obj:`Exception`
+ You can only input strings as ``name`` to this method.
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: __getitem__(key)
+
+
+ Get the instance logger based on a key.
+
+
+ :Parameters:
+
+ **key**
+ ..
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: add_handling_uncaught_exceptions(logger)
+ :staticmethod:
+
+
+
+ Redirect the output of an exception to a logger.
+
+
+ :Parameters:
+
+ **logger** : :class:`python:str`
+ Name of the logger.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/logging/PyMechanicalCustomAdapter.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/logging/PyMechanicalCustomAdapter.rst.txt
new file mode 100644
index 000000000..c8fdd9a10
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/logging/PyMechanicalCustomAdapter.rst.txt
@@ -0,0 +1,224 @@
+.. vale off
+
+
+
+:class:`PyMechanicalCustomAdapter`
+==================================
+
+.. py:class:: ansys.mechanical.core.logging.PyMechanicalCustomAdapter(logger, extra=None)
+
+ Bases: :py:obj:`logging.LoggerAdapter`
+
+
+
+ Keeps the reference to the name of the Mechanical instance dynamic.
+
+ The standard approach supplies extra input to the logger. If this approach
+ was used, Mechanical instances would have to be inputted every time a log
+ is created.
+
+ Using an adapter means that the reference to the Mechanical instance must only
+ be specified once.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+.. py:currentmodule:: PyMechanicalCustomAdapter
+
+Overview
+--------
+
+.. tab-set::
+
+
+
+ .. tab-item:: Methods
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+ * - :py:attr:`~process`
+ - Process the message.
+ * - :py:attr:`~log_to_file`
+ - Add a file handler to the logger.
+ * - :py:attr:`~log_to_stdout`
+ - Add a standard output handler to the logger.
+ * - :py:attr:`~setLevel`
+ - Change the log level of the object and the attached handlers.
+
+
+
+ .. tab-item:: Attributes
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+ * - :py:attr:`~level`
+ -
+ * - :py:attr:`~file_handler`
+ -
+ * - :py:attr:`~stdout_handler`
+ -
+
+
+
+
+
+
+Import detail
+-------------
+
+ from ansys.mechanical.core.logging import PyMechanicalCustomAdapter
+
+
+
+Attribute detail
+----------------
+.. py:attribute:: level
+ :value: None
+
+
+.. py:attribute:: file_handler
+ :value: None
+
+
+.. py:attribute:: stdout_handler
+ :value: None
+
+
+
+
+Method detail
+-------------
+.. py:method:: process(msg, kwargs)
+
+
+ Process the message.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: log_to_file(filename=FILE_NAME, level=LOG_LEVEL)
+
+
+ Add a file handler to the logger.
+
+
+ :Parameters:
+
+ **filename** : :class:`python:str`, :obj:`optional`
+ Name of the file where logs are recorded. The default is ``FILE_NAME``.
+
+ **level** : :class:`python:str`, :obj:`optional`
+ Level of logging. The default is ``None``, in which case the ``"DEBUG"``
+ level is used. Options are ``"DEBUG"``, ``"INFO"``, ``"WARNING"``,
+ and ``"ERROR"``.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: log_to_stdout(level=LOG_LEVEL)
+
+
+ Add a standard output handler to the logger.
+
+
+ :Parameters:
+
+ **level** : :class:`python:str`, :obj:`optional`
+ Level of logging. The default is ``None``, in which case the ``"DEBUG"``
+ level is used. Options are ``"DEBUG"``, ``"INFO"``, ``"WARNING"``,
+ and ``"ERROR"``.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: setLevel(level='DEBUG')
+
+
+ Change the log level of the object and the attached handlers.
+
+
+ :Parameters:
+
+ **level** : :class:`python:str`, :obj:`optional`
+ Level of logging. The default is ``"DEBUG"``. Options are ``"DEBUG"``,
+ ``"INFO"``, ``"WARNING"``, and ``"ERROR"``.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/logging/PyMechanicalFormatter.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/logging/PyMechanicalFormatter.rst.txt
new file mode 100644
index 000000000..0fd8cac35
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/logging/PyMechanicalFormatter.rst.txt
@@ -0,0 +1,60 @@
+.. vale off
+
+
+
+:class:`PyMechanicalFormatter`
+==============================
+
+.. py:class:: ansys.mechanical.core.logging.PyMechanicalFormatter(fmt=STDOUT_MSG_FORMAT, datefmt=None, style='%', validate=True, defaults=None)
+
+ Bases: :py:obj:`logging.Formatter`
+
+
+
+ Provides for overwriting default format styles with custom format styles.
+
+
+ :Parameters:
+
+ **fmt** : :obj:`optional`
+ The default is ``STDOUT_MSG_FORMAT``.
+
+ **datefmt** : :obj:`optional`
+ The default is ``None``.
+
+ **style** : :obj:`optional`
+ The default is ``%``.
+
+ **validate** : :ref:`bool `, :obj:`optional`
+ The default is ``None``.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+Import detail
+-------------
+
+ from ansys.mechanical.core.logging import PyMechanicalFormatter
+
+
+
+
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/logging/PyMechanicalPercentStyle.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/logging/PyMechanicalPercentStyle.rst.txt
new file mode 100644
index 000000000..68e6456cc
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/logging/PyMechanicalPercentStyle.rst.txt
@@ -0,0 +1,47 @@
+.. vale off
+
+
+
+:class:`PyMechanicalPercentStyle`
+=================================
+
+.. py:class:: ansys.mechanical.core.logging.PyMechanicalPercentStyle(fmt, *, defaults=None)
+
+ Bases: :py:obj:`logging.PercentStyle`
+
+
+
+ Controls the way PyMechanical formats the percent style.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+Import detail
+-------------
+
+ from ansys.mechanical.core.logging import PyMechanicalPercentStyle
+
+
+
+
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/logging/index.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/logging/index.rst.txt
new file mode 100644
index 000000000..8cc6b5ccd
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/logging/index.rst.txt
@@ -0,0 +1,681 @@
+.. vale off
+
+
+
+
+
+
+
+The ``logging.py`` module
+=========================
+
+.. py:module:: ansys.mechanical.core.logging
+
+
+Summary
+-------
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+.. py:currentmodule:: logging
+.. tab-set::
+
+
+
+
+ .. tab-item:: Classes
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~ansys.mechanical.core.logging.PyMechanicalCustomAdapter`
+ - Keeps the reference to the name of the Mechanical instance dynamic.
+
+
+ * - :py:obj:`~ansys.mechanical.core.logging.PyMechanicalPercentStyle`
+ - Controls the way PyMechanical formats the percent style.
+
+
+ * - :py:obj:`~ansys.mechanical.core.logging.PyMechanicalFormatter`
+ - Provides for overwriting default format styles with custom format styles.
+
+
+ * - :py:obj:`~ansys.mechanical.core.logging.InstanceFilter`
+ - Ensures that the instance name record always exists.
+
+
+ * - :py:obj:`~ansys.mechanical.core.logging.Logger`
+ - Provides for adding handlers to the logger for each Mechanical session.
+
+
+
+
+
+ .. tab-item:: Functions
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~addfile_handler`
+ - Add a file handler to the input.
+
+
+ * - :py:obj:`~add_stdout_handler`
+ - Add a file handler to the stand output handler.
+
+
+
+ .. tab-item:: Attributes
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~string_to_loglevel`
+ -
+
+
+
+ .. tab-item:: Constants
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~LOG_LEVEL`
+ - Default log level configuration.
+
+
+ * - :py:obj:`~FILE_NAME`
+ - Default file name.
+
+
+ * - :py:obj:`~DEBUG`
+ - Constant for logging.DEBUG.
+
+
+ * - :py:obj:`~INFO`
+ - Constant for logging.INFO.
+
+
+ * - :py:obj:`~WARN`
+ - Constant for logging.WARN.
+
+
+ * - :py:obj:`~ERROR`
+ - Constant for logging.ERROR.
+
+
+ * - :py:obj:`~CRITICAL`
+ - Constant for logging.CRITICAL.
+
+
+ * - :py:obj:`~STDOUT_MSG_FORMAT`
+ - Standard output message format.
+
+
+ * - :py:obj:`~FILE_MSG_FORMAT`
+ - File message format.
+
+
+ * - :py:obj:`~DEFAULT_STDOUT_HEADER`
+ - Default standard output header.
+
+
+ * - :py:obj:`~DEFAULT_FILE_HEADER`
+ - Default file header.
+
+
+ * - :py:obj:`~NEW_SESSION_HEADER`
+ - Default new session header containing date and time.
+
+
+
+
+
+
+
+.. toctree::
+ :titlesonly:
+ :maxdepth: 1
+ :hidden:
+
+ `_ package.
+The intent is not for this module to replace the ``logging`` package but rather to provide
+a way for the ``logging`` package and PyMechancial to interact.
+
+The loggers used in the module include the name of the instance, which
+is intended to be unique. This name is printed in all the active
+outputs and is used to track the different Mechanical instances.
+
+
+Usage
+-----
+
+Global logger
+~~~~~~~~~~~~~
+There is a global logger named ``pymechanical_global``, which is created at
+``ansys.mechanical.core.__init__``. If you want to use this global logger,
+you must call it at the top of your module:
+
+.. code:: python
+
+ from ansys.mechanical.core import LOG
+
+You can rename this logger to avoid conflicts with other loggers (if any):
+
+.. code:: python
+
+ from ansys.mechanical.core import LOG as logger
+
+
+The default logging level of ``LOG`` is ``ERROR``. To change this and output
+lower-level messages, you can use this code:
+
+.. code:: python
+
+ LOG.logger.setLevel("DEBUG")
+ LOG.file_handler.setLevel("DEBUG") # If present.
+ LOG.stdout_handler.setLevel("DEBUG") # If present.
+
+
+Alternatively, you can use this code:
+
+.. code:: python
+
+ LOG.setLevel("DEBUG")
+
+This alternative code ensures that all the handlers are set to the
+input log level.
+
+By default, this logger does not log to a file. If you want,
+you can add a file handler:
+
+.. code:: python
+
+ import os
+
+ file_path = os.path.join(os.getcwd(), "pymechanical.log")
+ LOG.log_to_file(file_path)
+
+The preceding code sets the logger to also be redirected to this file. If you
+want to change the characteristics of this global logger from the beginning
+of the execution, you must edit the file ``__init__`` in the
+``ansys.mechanical.core`` directory.
+
+To log using this logger, call the desired method as a normal logger:
+
+.. code:: pycon
+
+ >>> import logging
+ >>> from ansys.mechanical.core.logging import Logger
+ >>> LOG = Logger(level=logging.DEBUG, to_file=False, to_stdout=True)
+ >>> LOG.debug("This is LOG debug message.")
+
+ DEBUG - - - - This is the LOG debug message.
+
+
+Instance Logger
+~~~~~~~~~~~~~~~
+Every time an instance of the :class:`Mechanical `
+ckass is created, a logger is created and stored here:
+
+* ``LOG._instances``. This field is a ``dict`` where the key is the name of the
+ created logger.
+
+These logger instances inherit the ``pymechanical_global`` output handlers and
+logging level unless otherwise specified. The way this logger works is very
+similar to the global logger. You can add a file handler if you want using the
+:func:`log_to_file() ` method or change
+the log level using the :func:`logger.Logging.setLevel` method.
+
+You can use this logger like this:
+
+.. code:: pycon
+
+ >>> from ansys.mechanical.core import launch_mechanical
+ >>> mechanical = launch_mechanical()
+ >>> mechanical.log.info("This is a useful message")
+
+ INFO - GRPC_127.0.0.1:50056 - - -
+ This is a useful message
+
+Other loggers
+~~~~~~~~~~~~~
+You can create your own loggers using the Python ``logging`` package as
+you would do in any other script. There are no conflicts between these loggers.
+
+..
+ !! processed by numpydoc !!
+
+
+
+
+
+
+Module detail
+-------------
+
+.. py:function:: addfile_handler(logger, filename=FILE_NAME, level=LOG_LEVEL, write_headers=False)
+
+
+ Add a file handler to the input.
+
+
+ :Parameters:
+
+ **logger** : :obj:`logging.Logger` or :obj:`logging.Logger`
+ Logger to add the file handler to.
+
+ **filename** : :class:`python:str`, :obj:`optional`
+ Name of the output file. The default is ``FILE_NAME``.
+
+ **level** : :class:`python:str`, :obj:`optional`
+ Level of logging. The default is ``None``. Options are ``"DEBUG"``, ``"INFO"``,
+ ``"WARNING"`` and ``"ERROR"``.
+
+ **write_headers** : :ref:`bool `, :obj:`optional`
+ Whether to write headers to the file. The default is ``False``.
+
+ :Returns:
+
+ :obj:`logger`
+ Logger object.
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: add_stdout_handler(logger, level=LOG_LEVEL, write_headers=False)
+
+
+ Add a file handler to the stand output handler.
+
+
+ :Parameters:
+
+ **logger** : :obj:`logging.Logger` or :obj:`logging.Logger`
+ Logger to add the file handler to.
+
+ **level** : :class:`python:str`, :obj:`optional`
+ Level of logging. The default is ``None``. Options are ``"DEBUG"``, ``"INFO"``,
+ ``"WARNING"`` and ``"ERROR"``.
+
+ **write_headers** : :ref:`bool `, :obj:`optional`
+ Whether to write headers to the file. The default is ``False``.
+
+ :Returns:
+
+ :obj:`logger`
+ Logger object.
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: LOG_LEVEL
+
+
+ Default log level configuration.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: FILE_NAME
+ :value: 'pymechanical.log'
+
+
+
+ Default file name.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: DEBUG
+
+
+ Constant for logging.DEBUG.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: INFO
+
+
+ Constant for logging.INFO.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: WARN
+
+
+ Constant for logging.WARN.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: ERROR
+
+
+ Constant for logging.ERROR.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: CRITICAL
+
+
+ Constant for logging.CRITICAL.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: STDOUT_MSG_FORMAT
+ :value: '%(levelname)s - %(instance_name)s - %(module)s - %(funcName)s - %(message)s'
+
+
+
+ Standard output message format.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: FILE_MSG_FORMAT
+
+
+ File message format.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: DEFAULT_STDOUT_HEADER
+ :value: Multiline-String
+
+ .. raw:: html
+
+ Show Value
+
+ .. code-block:: python
+
+ """
+ LEVEL - INSTANCE NAME - MODULE - FUNCTION - MESSAGE
+ """
+
+ .. raw:: html
+
+ `, :obj:`optional`
+ Whether to exit Mechanical when Python exits. The default is ``True``.
+ When ``False``, Mechanical is not exited when the garbage for this
+ Mechanical instance is collected.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: wait_till_mechanical_is_ready(wait_time=-1)
+
+
+ Wait until Mechanical is ready.
+
+
+ :Parameters:
+
+ **wait_time** : :class:`python:float`, :obj:`optional`
+ Maximum allowable time in seconds for connecting to the Mechanical gRPC server.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: convert_to_server_log_level(log_level)
+ :staticmethod:
+
+
+
+ Convert the log level to the server log level.
+
+
+ :Parameters:
+
+ **log_level** : :class:`python:str`
+ Level of logging. Options are ``"DEBUG"``, ``"INFO"``, ``"WARNING"``,
+ ``"ERROR"``, and ``"CRITICAL"``.
+
+ :Returns:
+
+ :obj:`Converted` :obj:`log` :obj:`level` :obj:`for` :obj:`the` server.
+ ..
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: run_python_script(script_block: str, enable_logging=False, log_level='WARNING', progress_interval=2000)
+
+
+ Run a Python script block inside Mechanical.
+
+ It returns the string value of the last executed statement. If the value cannot be
+ returned as a string, it will return an empty string.
+
+ :Parameters:
+
+ **script_block** : :class:`python:str`
+ Script block (one or more lines) to run.
+
+ **enable_logging: bool, optional**
+ Whether to enable logging. The default is ``False``.
+
+ **log_level: str**
+ Level of logging. The default is ``"WARNING"``. Options are ``"DEBUG"``,
+ ``"INFO"``, ``"WARNING"``, and ``"ERROR"``.
+
+ **progress_interval: int, optional**
+ Frequency in milliseconds for getting log messages from the server.
+ The default is ``2000``.
+
+ :Returns:
+
+ :class:`python:str`
+ Script result.
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Return a value from a simple calculation.
+
+ >>> mechanical.run_python_script('2+3')
+ '5'
+
+ Return a string value from Project object.
+
+ >>> mechanical.run_python_script('ExtAPI.DataModel.Project.ProductVersion')
+ '2023 R1'
+
+ Return an empty string, when you try to return the Project object.
+
+ >>> mechanical.run_python_script('ExtAPI.DataModel.Project')
+ ''
+
+ Return an empty string for assignments.
+
+ >>> mechanical.run_python_script('version = ExtAPI.DataModel.Project.ProductVersion')
+ ''
+
+ Return value from the last executed statement from a variable.
+
+ >>> script='''
+ addition = 2 + 3
+ multiplication = 3 * 4
+ multiplication
+ '''
+ >>> mechanical.run_python_script(script)
+ '12'
+
+ Return value from last executed statement from a function call.
+
+ >>> script='''
+ import math
+ math.pow(2,3)
+ '''
+ >>> mechanical.run_python_script(script)
+ '8'
+
+ Handle an error scenario.
+
+ >>> script = 'hello_world()'
+ >>> import grpc
+ >>> try:
+ mechanical.run_python_script(script)
+ except grpc.RpcError as error:
+ print(error.details())
+ name 'hello_world' is not defined
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: run_python_script_from_file(file_path, enable_logging=False, log_level='WARNING', progress_interval=2000)
+
+
+ Run the contents a python file inside Mechanical.
+
+ It returns the string value of the last executed statement. If the value cannot be
+ returned as a string, it will return an empty string.
+
+ :Parameters:
+
+ **file_path**
+ Path for the Python file.
+
+ **enable_logging: bool, optional**
+ Whether to enable logging. The default is ``False``.
+
+ **log_level: str**
+ Level of logging. The default is ``"WARNING"``. Options are ``"DEBUG"``,
+ ``"INFO"``, ``"WARNING"``, and ``"ERROR"``.
+
+ **progress_interval: int, optional**
+ Frequency in milliseconds for getting log messages from the server.
+ The default is ``2000``.
+
+ :Returns:
+
+ :class:`python:str`
+ Script result.
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Return a value from a simple calculation.
+
+ Contents of **simple.py** file
+
+ 2+3
+
+ >>> mechanical.run_python_script_from_file('simple.py')
+ '5'
+
+ Return a value from a simple function call.
+
+ Contents of **test.py** file
+
+ import math
+
+ math.pow(2,3)
+
+ >>> mechanical.run_python_script_from_file('test.py')
+ '8'
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: exit(force=False)
+
+
+ Exit Mechanical.
+
+
+ :Parameters:
+
+ **force** : :ref:`bool `, :obj:`optional`
+ Whether to force Mechanical to exit. The default is ``False``, in which case
+ only Mechanical in UI mode asks for confirmation. This parameter overrides
+ any environment variables that may inhibit exiting Mechanical.
+
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Exit Mechanical.
+
+ >>> mechanical.Exit(force=True)
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: upload(file_name, file_location_destination=None, chunk_size=DEFAULT_FILE_CHUNK_SIZE, progress_bar=True)
+
+
+ Upload a file to the Mechanical instance.
+
+
+ :Parameters:
+
+ **file_name** : :class:`python:str`
+ Local file to upload. Only the file name is needed if the file
+ is relative to the current working directory. Otherwise, the full path
+ is needed.
+
+ **file_location_destination** : :class:`python:str`, :obj:`optional`
+ File location on the Mechanical server to upload the file to. The default is
+ ``None``, in which case the project directory is used.
+
+ **chunk_size** : :class:`python:int`, :obj:`optional`
+ Chunk size in bytes. The default is ``1048576``.
+
+ **progress_bar** : :ref:`bool `, :obj:`optional`
+ Whether to show a progress bar using ``tqdm``. The default is ``True``.
+ A progress bar is helpful for viewing upload progress.
+
+ :Returns:
+
+ :class:`python:str`
+ Base name of the uploaded file.
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Upload the ``hsec.x_t`` file with the progress bar not shown.
+
+ >>> mechanical.upload('hsec.x_t', progress_bar=False)
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: get_file_chunks(file_location, file_name, chunk_size, progress_bar)
+
+
+ Construct the file upload request for the server.
+
+
+ :Parameters:
+
+ **file_location_destination** : :class:`python:str`, :obj:`optional`
+ Directory where the file to upload to the server is located.
+
+ **file_name** : :class:`python:str`
+ Name of the file to upload.
+
+ **chunk_size** : :class:`python:int`
+ Chunk size in bytes.
+
+ **progress_bar** : :ref:`bool `
+ Whether to show a progress bar using ``tqdm``.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: list_files()
+
+
+ List the files in the working directory of Mechanical.
+
+
+
+ :Returns:
+
+ :class:`python:list`
+ List of files in the working directory of Mechanical.
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ List the files in the working directory.
+
+ >>> files = mechanical.list_files()
+ >>> for file in files: print(file)
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: download(files, target_dir=None, chunk_size=DEFAULT_CHUNK_SIZE, progress_bar=None, recursive=False)
+
+
+ Download files from the working directory of the Mechanical instance.
+
+ It downloads them from the working directory to the target directory. It returns the list
+ of local file paths for the downloaded files.
+
+ :Parameters:
+
+ **files** : :class:`python:str`, :class:`python:list`\[:class:`python:str`], :class:`python:tuple`\(:class:`python:str`)
+ One or more files on the Mechanical server to download. The files must be
+ in the same directory as the Mechanical instance. You can use the
+ :func:`Mechanical.list_files `
+ function to list current files. Alternatively, you can specify *glob expressions* to
+ match file names. For example, you could use ``file*`` to match every file whose
+ name starts with ``file``.
+
+ **target_dir: str**
+ Default directory to copy the downloaded files to. The default is ``None`` and
+ current working directory will be used as target directory.
+
+ **chunk_size** : :class:`python:int`, :obj:`optional`
+ Chunk size in bytes. The default is ``262144``. The value must be less than 4 MB.
+
+ **progress_bar** : :ref:`bool `, :obj:`optional`
+ Whether to show a progress bar using ``tqdm``. The default is ``None``, in
+ which case a progress bar is shown. A progress bar is helpful for viewing download
+ progress.
+
+ **recursive** : :ref:`bool `, :obj:`optional`
+ Whether to use recursion when using a glob pattern search. The default is ``False``.
+
+ :Returns:
+
+ :obj:`List`\[:class:`python:str`]
+ List of local file paths.
+
+
+
+
+
+
+
+
+ .. rubric:: Notes
+
+ There are some considerations to keep in mind when using the ``download()`` method:
+
+ * The glob pattern search does not search recursively in remote instances.
+ * In a remote instance, it is not possible to list or download files in a
+ location other than the Mechanical working directory.
+ * If you are connected to a local instance and provide a file path, downloading files
+ from a different folder is allowed but is not recommended.
+
+
+ .. rubric:: Examples
+
+ Download a single file.
+
+ >>> local_file_path_list = mechanical.download('file.out')
+
+ Download all files starting with ``file``.
+
+ >>> local_file_path_list = mechanical.download('file*')
+
+ Download every file in the Mechanical working directory.
+
+ >>> local_file_path_list = mechanical.download('*.*')
+
+ Alternatively, the recommended method is to use the
+ :func:`download_project() `
+ method to download all files.
+
+ >>> local_file_path_list = mechanical.download_project()
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: save_chunks_to_file(responses, filename, progress_bar=False, target_name='')
+
+
+ Save chunks to a local file.
+
+
+ :Parameters:
+
+ **responses**
+ ..
+
+ **filename** : :class:`python:str`
+ Name of the local file to save chunks to.
+
+ **progress_bar** : :ref:`bool `, :obj:`optional`
+ Whether to show a progress bar using ``tqdm``. The default is ``False``.
+
+ **target_name** : :class:`python:str`, :obj:`optional`
+ Name of the target file on the server. The default is ``""``. The file
+ must be in the same directory as the Mechanical instance. You can use the
+ ``mechanical.list_files()`` function to list current files.
+
+ :Returns:
+
+ **file_size** : :class:`python:int`
+ File size saved in bytes. If ``0`` is returned, no file was written.
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: download_project(extensions=None, target_dir=None, progress_bar=False)
+
+
+ Download all project files in the working directory of the Mechanical instance.
+
+ It downloads them from the working directory to the target directory. It returns the list
+ of local file paths for the downloaded files.
+
+ :Parameters:
+
+ **extensions** : :class:`python:list`\[:class:`python:str`], :class:`python:tuple`\[:class:`python:str`], :obj:`optional`
+ List of extensions for filtering files before downloading them. The
+ default is ``None``.
+
+ **target_dir** : :class:`python:str`, :obj:`optional`
+ Path for downloading the files to. The default is ``None``.
+
+ **progress_bar** : :ref:`bool `, :obj:`optional`
+ Whether to show a progress bar using ``tqdm``. The default is ``False``.
+ A progress bar is helpful for viewing download progress.
+
+ :Returns:
+
+ :obj:`List`\[:class:`python:str`]
+ List of local file paths.
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Download all the files in the project.
+
+ >>> local_file_path_list = mechanical.download_project()
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: clear()
+
+
+ Clear the database.
+
+
+
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Clear the database.
+
+ >>> mechanical.clear()
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: log_message(log_level, message)
+
+
+ Log the message using the given log level.
+
+
+ :Parameters:
+
+ **log_level: str**
+ Level of logging. Options are ``"DEBUG"``, ``"INFO"``, ``"WARNING"``,
+ and ``"ERROR"``.
+
+ **message** : :class:`python:str`
+ Message to log.
+
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Log a debug message.
+
+ >>> mechanical.log_message('DEBUG', 'debug message')
+
+ Log an info message.
+
+ >>> mechanical.log_message('INFO', 'info message')
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: log_debug(message)
+
+
+ Log the debug message.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: log_info(message)
+
+
+ Log the info message.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: log_warning(message)
+
+
+ Log the warning message.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: log_error(message)
+
+
+ Log the error message.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: verify_valid_connection()
+
+
+ Verify whether the connection to Mechanical is valid.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/mechanical/index.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/mechanical/index.rst.txt
new file mode 100644
index 000000000..8aecae2c9
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/mechanical/index.rst.txt
@@ -0,0 +1,885 @@
+.. vale off
+
+
+
+
+
+
+
+The ``mechanical.py`` module
+============================
+
+.. py:module:: ansys.mechanical.core.mechanical
+
+
+Summary
+-------
+
+
+
+
+
+
+
+
+
+
+.. py:currentmodule:: mechanical
+.. tab-set::
+
+
+
+
+ .. tab-item:: Classes
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~ansys.mechanical.core.mechanical.Mechanical`
+ - Connects to a gRPC Mechanical server and allows commands to be passed.
+
+
+
+
+
+ .. tab-item:: Functions
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~setup_logger`
+ - Initialize the logger for the given mechanical instance.
+
+
+ * - :py:obj:`~suppress_logging`
+ - Decorate a function to suppress the logging for a Mechanical instance.
+
+
+ * - :py:obj:`~port_in_use`
+ - Check whether a port is in use at the given host.
+
+
+ * - :py:obj:`~check_ports`
+ - Check the state of ports in a port range.
+
+
+ * - :py:obj:`~close_all_local_instances`
+ - Close all Mechanical instances within a port range.
+
+
+ * - :py:obj:`~create_ip_file`
+ - Create the ``mylocal.ip`` file needed to change the IP address of the gRPC server.
+
+
+ * - :py:obj:`~get_mechanical_path`
+ - Get path.
+
+
+ * - :py:obj:`~check_valid_mechanical`
+ - Change to see if the default Mechanical path is valid.
+
+
+ * - :py:obj:`~change_default_mechanical_path`
+ - Change default path.
+
+
+ * - :py:obj:`~save_mechanical_path`
+ - Save path.
+
+
+ * - :py:obj:`~get_start_instance`
+ - Check if the ``PYMECHANICAL_START_INSTANCE`` environment variable exists and is valid.
+
+
+ * - :py:obj:`~launch_grpc`
+ - Start Mechanical locally in gRPC mode.
+
+
+ * - :py:obj:`~launch_remote_mechanical`
+ - Start Mechanical remotely using the Product Instance Management (PIM) API.
+
+
+ * - :py:obj:`~launch_mechanical`
+ - Start Mechanical locally.
+
+
+
+ .. tab-item:: Attributes
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~client_to_server_loglevel`
+ -
+
+
+
+ .. tab-item:: Constants
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~MAX_MESSAGE_LENGTH`
+ - Default message length.
+
+
+ * - :py:obj:`~DEFAULT_CHUNK_SIZE`
+ - Default chunk size.
+
+
+ * - :py:obj:`~DEFAULT_FILE_CHUNK_SIZE`
+ - Default file chunk size.
+
+
+ * - :py:obj:`~LOCALHOST`
+ - Localhost address.
+
+
+ * - :py:obj:`~MECHANICAL_DEFAULT_PORT`
+ - Default Mechanical port.
+
+
+ * - :py:obj:`~GALLERY_INSTANCE`
+ - List of gallery instances.
+
+
+
+
+
+
+
+.. toctree::
+ :titlesonly:
+ :maxdepth: 1
+ :hidden:
+
+ `, :obj:`optional`
+ Whether to use threads to close the Mechanical instances.
+ The default is ``True``. So this call will return immediately.
+
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Close all Mechanical instances connected on local ports.
+
+ >>> import ansys.mechanical.core as pymechanical
+ >>> pymechanical.close_all_local_instances()
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: create_ip_file(ip, path)
+
+
+ Create the ``mylocal.ip`` file needed to change the IP address of the gRPC server.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: get_mechanical_path(allow_input=True)
+
+
+ Get path.
+
+ Deprecated - use `ansys.tools.path.get_mechanical_path` instead
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: check_valid_mechanical()
+
+
+ Change to see if the default Mechanical path is valid.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: change_default_mechanical_path(exe_loc)
+
+
+ Change default path.
+
+ Deprecated - use `ansys.tools.path.change_default_mechanical_path` instead.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: save_mechanical_path(exe_loc=None)
+
+
+ Save path.
+
+ Deprecated - use `ansys.tools.path.save_mechanical_path` instead.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: get_start_instance(start_instance_default=True)
+
+
+ Check if the ``PYMECHANICAL_START_INSTANCE`` environment variable exists and is valid.
+
+
+ :Parameters:
+
+ **start_instance_default** : :ref:`bool `, :obj:`optional`
+ Value to return when ``PYMECHANICAL_START_INSTANCE`` is unset.
+
+ :Returns:
+
+ :ref:`bool `
+ ``True`` when the ``PYMECHANICAL_START_INSTANCE`` environment variable exists
+ and is valid, ``False`` when this environment variable does not exist or is not valid.
+ If it is unset, ``start_instance_default`` is returned.
+
+
+
+
+ :Raises:
+
+ :obj:`OSError`
+ Raised when ``PYMECHANICAL_START_INSTANCE`` is not either ``True`` or ``False``
+ (case independent).
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: launch_grpc(exec_file='', batch=True, port=MECHANICAL_DEFAULT_PORT, additional_switches=None, additional_envs=None, verbose=False) -> int
+
+
+ Start Mechanical locally in gRPC mode.
+
+
+ :Parameters:
+
+ **exec_file** : :class:`python:str`, :obj:`optional`
+ Path for the Mechanical executable file. The default is ``None``, in which
+ case the cached location is used.
+
+ **batch** : :ref:`bool `, :obj:`optional`
+ Whether to launch Mechanical in batch mode. The default is ``True``.
+ When ``False``, Mechanical is launched in UI mode.
+
+ **port** : :class:`python:int`, :obj:`optional`
+ Port to launch the Mechanical instance on. The default is
+ ``MECHANICAL_DEFAULT_PORT``. The final port is the first
+ port available after (or including) this port.
+
+ **additional_switches** : :class:`python:list`, :obj:`optional`
+ List of additional arguments to pass. The default is ``None``.
+
+ **additional_envs** : :obj:`dictionary`, :obj:`optional`
+ Dictionary of additional environment variables to pass. The default
+ is ``None``.
+
+ **verbose** : :ref:`bool `, :obj:`optional`
+ Whether to print all output when launching and running Mechanical. The
+ default is ``False``. Printing all output is not recommended unless
+ you are debugging the startup of Mechanical.
+
+ :Returns:
+
+ :class:`python:int`
+ Port number that the Mechanical instance started on.
+
+
+
+
+
+
+
+
+ .. rubric:: Notes
+
+ If ``PYMECHANICAL_START_INSTANCE`` is set to FALSE, the ``launch_mechanical``
+ method looks for an existing instance of Mechanical at ``PYMECHANICAL_IP`` on port
+ ``PYMECHANICAL_PORT``, with default to ``127.0.0.1`` and ``10000`` if unset.
+ This is typically used for automated documentation and testing.
+
+
+ .. rubric:: Examples
+
+ Launch Mechanical using the default configuration.
+
+ >>> from ansys.mechanical.core import launch_mechanical
+ >>> mechanical = launch_mechanical()
+
+ Launch Mechanical using a specified executable file.
+
+ >>> exec_file_path = 'C:/Program Files/ANSYS Inc/v231/aisol/bin/win64/AnsysWBU.exe'
+ >>> mechanical = launch_mechanical(exec_file_path)
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: launch_remote_mechanical(version=None) -> (grpc.Channel, ansys.platform.instancemanagement.Instance)
+
+
+ Start Mechanical remotely using the Product Instance Management (PIM) API.
+
+ When calling this method, you must ensure that you are in an environment
+ where PyPIM is configured. You can use the
+ :func:`pypim.is_configured `
+ method to verify that PyPIM is configured.
+
+ :Parameters:
+
+ **version** : :class:`python:str`, :obj:`optional`
+ Mechanical version to run in the three-digit format. For example, ``"231"`` to
+ run 2023 R1. The default is ``None``, in which case the server runs the latest
+ installed version.
+
+ :Returns:
+
+ :obj:`Tuple` :obj:`containing` :obj:`channel`, remote_instance.
+ ..
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: launch_mechanical(allow_input=True, exec_file=None, batch=True, loglevel='ERROR', log_file=False, log_mechanical=None, additional_switches=None, additional_envs=None, start_timeout=120, port=None, ip=None, start_instance=None, verbose_mechanical=False, clear_on_connect=False, cleanup_on_exit=True, version=None, keep_connection_alive=True) -> Mechanical
+
+
+ Start Mechanical locally.
+
+
+ :Parameters:
+
+ **allow_input: bool, optional**
+ Whether to allow user input when discovering the path to the Mechanical
+ executable file.
+
+ **exec_file** : :class:`python:str`, :obj:`optional`
+ Path for the Mechanical executable file. The default is ``None``,
+ in which case the cached location is used. If PyPIM is configured
+ and this parameter is set to ``None``, PyPIM launches Mechanical
+ using its ``version`` parameter.
+
+ **batch** : :ref:`bool `, :obj:`optional`
+ Whether to launch Mechanical in batch mode. The default is ``True``.
+ When ``False``, Mechanical launches in UI mode.
+
+ **loglevel** : :class:`python:str`, :obj:`optional`
+ Level of messages to print to the console.
+ Options are:
+
+ - ``"WARNING"``: Prints only Ansys warning messages.
+ - ``"ERROR"``: Prints only Ansys error messages.
+ - ``"INFO"``: Prints all Ansys messages.
+
+ The default is ``WARNING``.
+
+ **log_file** : :ref:`bool `, :obj:`optional`
+ Whether to copy the messages to a file named ``logs.log``, which is
+ located where the Python script is executed. The default is ``False``.
+
+ **log_mechanical** : :class:`python:str`, :obj:`optional`
+ Path to the output file on the local disk to write every script
+ command to. The default is ``None``. However, you might set
+ ``"log_mechanical='pymechanical_log.txt'"`` to write all commands that are
+ sent to Mechanical via PyMechanical to this file. You can then use these
+ commands to run a script within Mechanical without PyMechanical.
+
+ **additional_switches** : :class:`python:list`, :obj:`optional`
+ Additional switches for Mechanical. The default is ``None``.
+
+ **additional_envs** : :obj:`dictionary`, :obj:`optional`
+ Dictionary of additional environment variables to pass. The default
+ is ``None``.
+
+ **start_timeout** : :class:`python:float`, :obj:`optional`
+ Maximum allowable time in seconds to connect to the Mechanical server.
+ The default is ``120``.
+
+ **port** : :class:`python:int`, :obj:`optional`
+ Port to launch the Mechanical gRPC server on. The default is ``None``,
+ in which case ``10000`` is used. The final port is the first
+ port available after (or including) this port. You can override the
+ default behavior of this parameter with the
+ ``PYMECHANICAL_PORT=`` environment variable.
+
+ **ip** : :class:`python:str`, :obj:`optional`
+ IP address to use only when ``start_instance`` is ``False``. The
+ default is ``None``, in which case ``"127.0.0.1"`` is used. If you
+ provide an IP address, ``start_instance`` is set to ``False``.
+ A host name can be provided as an alternative to an IP address.
+
+ **start_instance** : :ref:`bool `, :obj:`optional`
+ Whether to launch and connect to a new Mechanical instance. The default
+ is ``None``, in which case an attempt is made to connect to an existing
+ Mechanical instance at the given ``ip`` and ``port`` parameters, which have
+ defaults of ``"127.0.0.1"`` and ``10000`` respectively. When ``True``,
+ a local instance of Mechanical is launched. You can override the default
+ behavior of this parameter with the ``PYMECHANICAL_START_INSTANCE=FALSE``
+ environment variable.
+
+ **verbose_mechanical** : :ref:`bool `, :obj:`optional`
+ Whether to enable printing of all output when launching and running
+ a Mechanical instance. The default is ``False``. This parameter should be
+ set to ``True`` for debugging only as output can be tracked within
+ PyMechanical.
+
+ **clear_on_connect** : :ref:`bool `, :obj:`optional`
+ When ``start_instance`` is ``False``, whether to clear the environment
+ when connecting to Mechanical. The default is ``False``. When ``True``,
+ a fresh environment is provided when you connect to Mechanical.
+
+ **cleanup_on_exit** : :ref:`bool `, :obj:`optional`
+ Whether to exit Mechanical when Python exits. The default is ``True``.
+ When ``False``, Mechanical is not exited when the garbage for this Mechanical
+ instance is collected.
+
+ **version** : :class:`python:str`, :obj:`optional`
+ Mechanical version to run in the three-digit format. For example, ``"231"``
+ for 2023 R1. The default is ``None``, in which case the server runs the
+ latest installed version. If PyPIM is configured and ``exce_file=None``,
+ PyPIM launches Mechanical using its ``version`` parameter.
+
+ **keep_connection_alive** : :ref:`bool `, :obj:`optional`
+ Whether to keep the gRPC connection alive by running a background thread
+ and making dummy calls for remote connections. The default is ``True``.
+
+ :Returns:
+
+ :obj:`ansys.mechanical.core.mechanical.Mechanical`
+ Instance of Mechanical.
+
+
+
+
+
+
+
+
+ .. rubric:: Notes
+
+ If the environment is configured to use `PyPIM `_
+ and ``start_instance=True``, then starting the instance is delegated to PyPIM.
+ In this case, most of the preceding parameters are ignored because the server-side
+ configuration is used.
+
+
+ .. rubric:: Examples
+
+ Launch Mechanical.
+
+ >>> from ansys.mechanical.core import launch_mechanical
+ >>> mech = launch_mechanical()
+
+ Launch Mechanical using a specified executable file.
+
+ >>> exec_file_path = 'C:/Program Files/ANSYS Inc/v231/aisol/bin/win64/AnsysWBU.exe'
+ >>> mech = launch_mechanical(exec_file_path)
+
+ Connect to an existing Mechanical instance at IP address ``192.168.1.30`` on port
+ ``50001``.
+
+ >>> mech = launch_mechanical(start_instance=False, ip='192.168.1.30', port=50001)
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: MAX_MESSAGE_LENGTH
+
+
+ Default message length.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: DEFAULT_CHUNK_SIZE
+
+
+ Default chunk size.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: DEFAULT_FILE_CHUNK_SIZE
+
+
+ Default file chunk size.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: LOCALHOST
+ :value: '127.0.0.1'
+
+
+
+ Localhost address.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: MECHANICAL_DEFAULT_PORT
+ :value: 10000
+
+
+
+ Default Mechanical port.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: GALLERY_INSTANCE
+ :value: [None]
+
+
+
+ List of gallery instances.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:data:: client_to_server_loglevel
+
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/misc/index.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/misc/index.rst.txt
new file mode 100644
index 000000000..88c434a6c
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/misc/index.rst.txt
@@ -0,0 +1,329 @@
+.. vale off
+
+
+
+
+
+
+
+The ``misc.py`` module
+======================
+
+.. py:module:: ansys.mechanical.core.misc
+
+
+Summary
+-------
+
+
+
+
+
+
+
+
+.. py:currentmodule:: misc
+.. tab-set::
+
+
+
+
+
+
+
+ .. tab-item:: Functions
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~is_windows`
+ - Check if the host machine is on Windows.
+
+
+ * - :py:obj:`~get_mechanical_bin`
+ - Get the path for the Mechanical executable file based on the release version.
+
+
+ * - :py:obj:`~threaded`
+ - Decorate a function with this decorator to call it using a thread.
+
+
+ * - :py:obj:`~threaded_daemon`
+ - Decorate a function with this decorator to call it using a daemon thread.
+
+
+ * - :py:obj:`~check_valid_ip`
+ - Check if the IP address is valid.
+
+
+ * - :py:obj:`~check_valid_port`
+ - Check if the port is valid.
+
+
+ * - :py:obj:`~check_valid_start_instance`
+ - Check if the value obtained from the environmental variable is valid.
+
+
+ * - :py:obj:`~is_float`
+ - Check if a string can be converted to a float.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Description
+-----------
+
+Contain miscellaneous functions and methods at the module level.
+
+..
+ !! processed by numpydoc !!
+
+
+
+
+
+
+Module detail
+-------------
+
+.. py:function:: is_windows()
+
+
+ Check if the host machine is on Windows.
+
+
+
+ :Returns:
+
+ ``True`` :obj:`if` :obj:`the` :obj:`host` :obj:`machine` :obj:`is` :obj:`on` :obj:`Windows`, ``False`` otherwise.
+ ..
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: get_mechanical_bin(release_version)
+
+
+ Get the path for the Mechanical executable file based on the release version.
+
+
+ :Parameters:
+
+ **release_version: str**
+ Mechanical version using the three-digit format. For example, ``"231"`` for
+ 2023 R1.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: threaded(func)
+
+
+ Decorate a function with this decorator to call it using a thread.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: threaded_daemon(func)
+
+
+ Decorate a function with this decorator to call it using a daemon thread.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: check_valid_ip(ip)
+
+
+ Check if the IP address is valid.
+
+
+ :Parameters:
+
+ **ip** : :class:`python:str`
+ IP address to check.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: check_valid_port(port, lower_bound=1000, high_bound=60000)
+
+
+ Check if the port is valid.
+
+ Parameters
+ ---------
+ port : int
+ Port to check.
+ lower_bound : int, optional
+ Lowest possible value for the port. The default is ``1000``.
+ high_bound : int, optional
+ Highest possible value for the port. The default is ``60000``.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: check_valid_start_instance(start_instance)
+
+
+ Check if the value obtained from the environmental variable is valid.
+
+
+ :Parameters:
+
+ **start_instance** : :class:`python:str`, :ref:`bool `
+ Value obtained from the corresponding environment variable.
+
+ :Returns:
+
+ :ref:`bool `
+ ``True`` if ``start_instance`` is ``True`` or ``"True"``,
+ ``False`` otherwise.
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:function:: is_float(input_string)
+
+
+ Check if a string can be converted to a float.
+
+
+ :Parameters:
+
+ **input_string** : :class:`python:str`
+ String to check.
+
+ :Returns:
+
+ :ref:`bool `
+ ``True`` when conversion is possible, ``False`` otherwise.
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/pool/LocalMechanicalPool.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/pool/LocalMechanicalPool.rst.txt
new file mode 100644
index 000000000..7b1866fe6
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/pool/LocalMechanicalPool.rst.txt
@@ -0,0 +1,532 @@
+.. vale off
+
+
+
+:class:`LocalMechanicalPool`
+============================
+
+.. py:class:: ansys.mechanical.core.pool.LocalMechanicalPool(n_instances, wait=True, port=MECHANICAL_DEFAULT_PORT, progress_bar=True, restart_failed=True, **kwargs)
+
+
+ Create a pool of Mechanical instances.
+
+
+ :Parameters:
+
+ **n_instance** : :class:`python:int`
+ Number of Mechanical instances to create in the pool.
+
+ **wait** : :ref:`bool `, :obj:`optional`
+ Whether to wait for the pool to be initialized. The default is
+ ``True``. When ``False``, the pool starts in the background, in
+ which case all resources might not be immediately available.
+
+ **starting_port** : :class:`python:int`, :obj:`optional`
+ Starting port for the instances. The default is ``10000``.
+
+ **progress_bar** : :ref:`bool `, :obj:`optional`
+ Whether to show a progress bar when starting the pool. The default
+ is ``True``, but the progress bar is not shown when ``wait=False``.
+
+ **restart_failed** : :ref:`bool `, :obj:`optional`
+ Whether to restart any failed instances in the pool. The default is
+ ``True``.
+
+ **\*\*kwargs** : :class:`python:dict`, :obj:`optional`
+ Additional keyword arguments. For a list of all keyword
+ arguments, use the :func:`ansys.mechanical.core.launch_mechanical`
+ function. If the ``exec_file`` keyword argument is found, it is used to
+ start instances. PyPIM is used to create instances if the following
+ conditions are met:
+
+ - PyPIM is configured.
+ - ``version`` is specified.
+ - ``exec_file`` is not specified.
+
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Create a pool of 10 Mechanical instances.
+
+ >>> from ansys.mechanical.core import LocalMechanicalPool
+ >>> pool = LocalMechanicalPool(10)
+ Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+ On Windows, create a pool while specifying the Mechanical executable file.
+
+ >>> exec_file = 'C:/Program Files/ANSYS Inc/v231/aisol/bin/winx64/AnsysWBU.exe'
+ >>> pool = LocalMechanicalPool(10, exec_file=exec_file)
+ Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+ On Linux, create a pool while specifying the Mechanical executable file.
+
+ >>> exec_file = '/ansys_inc/v231/aisol/.workbench'
+ >>> pool = LocalMechanicalPool(10, exec_file=exec_file)
+ Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+ In the PyPIM environment, create a pool.
+
+ >>> pool = LocalMechanicalPool(10, version="231")
+ Creating Pool: 100%|########| 10/10 [00:01<00:00, 1.43it/s]
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+
+
+
+
+.. py:currentmodule:: LocalMechanicalPool
+
+Overview
+--------
+
+.. tab-set::
+
+
+
+ .. tab-item:: Methods
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+ * - :py:attr:`~map`
+ - Run a user-defined function on each Mechanical instance in the pool.
+ * - :py:attr:`~run_batch`
+ - Run a batch of input files on the Mechanical instances in the pool.
+ * - :py:attr:`~next_available`
+ - Wait until a Mechanical instance is available and return this instance.
+ * - :py:attr:`~exit`
+ - Exit all Mechanical instances in the pool.
+
+
+ .. tab-item:: Properties
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+ * - :py:attr:`~ports`
+ - Get a list of the ports that are used.
+
+
+
+
+ .. tab-item:: Special methods
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+ * - :py:attr:`~__del__`
+ - Clean up when complete.
+ * - :py:attr:`~__len__`
+ - Get the number of instances in the pool.
+ * - :py:attr:`~__getitem__`
+ - Get an instance by an index.
+ * - :py:attr:`~__iter__`
+ - Iterate through active instances.
+ * - :py:attr:`~__str__`
+ - Get the string representation of this object.
+
+
+
+
+Import detail
+-------------
+
+ from ansys.mechanical.core.pool import LocalMechanicalPool
+
+
+Property detail
+---------------
+.. py:property:: ports
+
+ Get a list of the ports that are used.
+
+
+
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Get the list of ports used by the pool of Mechanical instances.
+
+ >>> pool.ports
+ [10001, 10002]
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+
+
+Method detail
+-------------
+.. py:method:: map(func, iterable=None, clear_at_start=True, progress_bar=True, close_when_finished=False, timeout=None, wait=True)
+
+
+ Run a user-defined function on each Mechanical instance in the pool.
+
+
+ :Parameters:
+
+ **func** : :obj:`function`
+ Function with ``mechanical`` as the first argument. The subsequent
+ arguments should match the number of items in each iterable (if any).
+
+ **iterable** : :class:`python:list`, :class:`python:tuple`, :obj:`optional`
+ An iterable containing a set of arguments for the function.
+ The default is ``None``, in which case the function runs
+ once on each instance of Mechanical.
+
+ **clear_at_start** : :ref:`bool `, :obj:`optional`
+ Clear Mechanical at the start of execution. The default is
+ ``True``. Setting this to ``False`` might lead to instability.
+
+ **progress_bar** : :ref:`bool `, :obj:`optional`
+ Whether to show a progress bar when running the batch of input
+ files. The default is ``True``, but the progress bar is not shown
+ when ``wait=False``.
+
+ **close_when_finished** : :ref:`bool `, :obj:`optional`
+ Whether to close the instances when the function finishes running
+ on all instances in the pool. The default is ``False``.
+
+ **timeout** : :class:`python:float`, :obj:`optional`
+ Maximum runtime in seconds for each iteration. The default is
+ ``None``, in which case there is no timeout. If you specify a
+ value, each iteration is allowed to run only this number of
+ seconds. Once this value is exceeded, the batch process is
+ stopped and treated as a failure.
+
+ **wait** : :ref:`bool `, :obj:`optional`
+ Whether block execution must wait until the batch process is
+ complete. The default is ``True``.
+
+ :Returns:
+
+ :class:`python:list`
+ A list containing the return values for the function.
+ Failed runs do not return an output. Because return values
+ are not necessarily in the same order as the iterable,
+ you might want to add some sort of tracker to the return
+ of your function.
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Run several input files while storing the final routine. Note
+ how the function to map must use ``mechanical`` as the first argument.
+ The function can have any number of additional arguments.
+
+ >>> from ansys.mechanical.core import LocalMechanicalPool
+ >>> pool = LocalMechanicalPool(10)
+ >>> completed_indices = []
+ >>> def function(mechanical, name, script):
+ # name, script = args
+ mechanical.clear()
+ output = mechanical.run_python_script(script)
+ return name, output
+ >>> inputs = [("first","2+3"), ("second", "3+4")]
+ >>> output = pool.map(function, inputs, progress_bar=False, wait=True)
+ [('first', '5'), ('second', '7')]
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: run_batch(files, clear_at_start=True, progress_bar=True, close_when_finished=False, timeout=None, wait=True)
+
+
+ Run a batch of input files on the Mechanical instances in the pool.
+
+
+ :Parameters:
+
+ **files** : :class:`python:list`
+ List of input files.
+
+ **clear_at_start** : :ref:`bool `, :obj:`optional`
+ Whether to clear Mechanical when execution starts. The default is
+ ``True``. Setting this parameter to ``False`` might lead to
+ instability.
+
+ **progress_bar** : :ref:`bool `, :obj:`optional`
+ Whether to show a progress bar when running the batch of input
+ files. The default is ``True``, but the progress bar is not shown
+ when ``wait=False``.
+
+ **close_when_finished** : :ref:`bool `, :obj:`optional`
+ Whether to close the instances when running the batch
+ of input files is finished. The default is ``False``.
+
+ **timeout** : :class:`python:float`, :obj:`optional`
+ Maximum runtime in seconds for each iteration. The default is
+ ``None``, in which case there is no timeout. If you specify a
+ value, each iteration is allowed to run only this number of
+ seconds. Once this value is exceeded, the batch process is stopped
+ and treated as a failure.
+
+ **wait** : :ref:`bool `, :obj:`optional`
+ Whether block execution must wait until the batch process is complete.
+ The default is ``True``.
+
+ :Returns:
+
+ :class:`python:list`
+ List of text outputs from Mechanical for each batch run. The outputs
+ are not necessarily listed in the order of the inputs. Failed runs do
+ not return an output. Because the return outputs are not
+ necessarily in the same order as ``iterable``, you might
+ want to add some sort of tracker or note within the input files.
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ Run 20 verification files on the pool.
+
+ >>> files = [f"test{index}.py" for index in range(1, 21)]
+ >>> outputs = pool.run_batch(files)
+ >>> len(outputs)
+ 20
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: next_available(return_index=False)
+
+
+ Wait until a Mechanical instance is available and return this instance.
+
+
+ :Parameters:
+
+ **return_index** : :ref:`bool `, :obj:`optional`
+ Whether to return the index along with the instance. The default
+ is ``False``.
+
+ :Returns:
+
+ :obj:`pymechanical.Mechanical`
+ Instance of Mechanical.
+
+ :class:`python:int`
+ Index within the pool of Mechanical instances. This index
+ is not returned by default.
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ >>> mechanical = pool.next_available()
+ >>> mechanical
+ Ansys Mechanical [Ansys Mechanical Enterprise]
+ Product Version:231
+ Software build date:Wed Jul 13 14:29:54 2022
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: __del__()
+
+
+ Clean up when complete.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: exit(block=False)
+
+
+ Exit all Mechanical instances in the pool.
+
+
+ :Parameters:
+
+ **block** : :ref:`bool `, :obj:`optional`
+ Whether to wait until all processes close before exiting
+ all instances in the pool. The default is ``False``.
+
+
+
+
+
+
+
+
+
+
+
+ .. rubric:: Examples
+
+ >>> pool.exit()
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: __len__()
+
+
+ Get the number of instances in the pool.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: __getitem__(key)
+
+
+ Get an instance by an index.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: __iter__()
+
+
+ Iterate through active instances.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+.. py:method:: __str__()
+
+
+ Get the string representation of this object.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ..
+ !! processed by numpydoc !!
+
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/ansys/mechanical/core/pool/index.rst.txt b/version/0.11/_sources/api/ansys/mechanical/core/pool/index.rst.txt
new file mode 100644
index 000000000..d6a674283
--- /dev/null
+++ b/version/0.11/_sources/api/ansys/mechanical/core/pool/index.rst.txt
@@ -0,0 +1,130 @@
+.. vale off
+
+
+
+
+
+
+
+The ``pool.py`` module
+======================
+
+.. py:module:: ansys.mechanical.core.pool
+
+
+Summary
+-------
+
+
+
+
+
+
+
+
+
+
+.. py:currentmodule:: pool
+.. tab-set::
+
+
+
+
+ .. tab-item:: Classes
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~ansys.mechanical.core.pool.LocalMechanicalPool`
+ - Create a pool of Mechanical instances.
+
+
+
+
+
+ .. tab-item:: Functions
+
+ .. list-table::
+ :header-rows: 0
+ :widths: auto
+
+
+ * - :py:obj:`~available_ports`
+ - Get a list of a given number of available ports starting from a specified port number.
+
+
+
+
+
+
+
+
+
+.. toctree::
+ :titlesonly:
+ :maxdepth: 1
+ :hidden:
+
+ `_ .
+
+
+.. vale on
\ No newline at end of file
diff --git a/version/0.11/_sources/api/path.rst.txt b/version/0.11/_sources/api/path.rst.txt
new file mode 100644
index 000000000..db5cc7aad
--- /dev/null
+++ b/version/0.11/_sources/api/path.rst.txt
@@ -0,0 +1,18 @@
+.. _ref_ansys_tools_path_api:
+
+Ansys tools path
+================
+
+These methods on the ``ansys-tools-path`` module provide helper functions for configuration and discovery
+of the installation path of the Mechanical application.
+
+.. currentmodule:: ansys.tools.path
+
+.. autosummary::
+ :toctree: _autosummary
+
+
+ find_mechanical
+ get_mechanical_path
+ change_default_mechanical_path
+ save_mechanical_path
\ No newline at end of file
diff --git a/version/0.11/_sources/architecture.rst.txt b/version/0.11/_sources/architecture.rst.txt
new file mode 100644
index 000000000..4dd8fc2c1
--- /dev/null
+++ b/version/0.11/_sources/architecture.rst.txt
@@ -0,0 +1,225 @@
+.. _ref_architecture:
+
+PyMechanical architecture
+=========================
+
+PyMechanical provides a Python interface to Ansys Mechanical. Mechanical is a
+polyglot [#f1]_ desktop app whose graphical user interface (GUI) runs on either
+the Windows or Linux operating system. Mechanical's APIs are implemented in C#
+using .NET Framework 4.x. They are exposed to both C# and two implementations
+[#f2]_ of Python, namely IronPython [#f3]_ and CPython.
+
+Within Mechanical, Python scripting enables you to automate repetitive GUI
+actions. This is not unlike other apps developed either by Ansys or other
+software companies. Python scripting leverages the Mechanical API.
+
+Mechanical, like some other apps, is customizable. Using the same API that you
+would use for scripting, you can implement extensions that add to the
+capabilities of Mechanical. For example, buttons can be added to the GUI and
+custom objects can be added to the data model. Even third-party or in-house
+solvers can be integrated into Mechanical and can take advantage of the
+powerful meshing, generic CAD reader, and the intuitive pre- and post-
+processing experience of Mechanical.
+
+Before discussing how Mechanical's API is implemented, the software design
+pattern known as the *command pattern* is explored. This pattern can be used in many
+programming languages. For a general description (using the Java programming
+language) of the command pattern, see `Command Design Pattern
+` on the *Red Hat
+Technology Topics* page.
+
+Remote method invocation
+------------------------
+
+In the nineties, *Object Oriented Programming* (OOP) exploded in popularity.
+Among other things, OOP allows programmers to add abstractions on top of data
+in their code using objects. When done well, objects can reduce code complexity
+and makes large scale software easier to reason about. It was thought that even
+the difference between RPCs and calls made in a program's address space could
+be abstracted. In effect, the user of an object does not need to know whether
+an object exists remotely or locally. Operations on that object could be done
+in the same way, regardless.
+
+This approach is known as *Remote Method Invocation* (RMI). RMI was widely
+implemented using CORBA, DCOM, Remoting (.NET), and Java RMI. However, this
+approach has fallen out of favor with the rise of the internet, as it was
+observed that it does not scale in the same way that something like REST does.
+As it became less popular, tools, and library support fell away. For instance,
+recent versions of .NET do not implement the Remoting library, and COM/DCOM are
+no longer taken seriously by web apps.
+
+For an illuminating discussion of the problems with RMI, see `Microservices and
+the First Law of Distributed Objects
+`_ on
+Martin Fowler's website.
+
+Remote mechanical
+=================
+
+Mechanical's official API is that of an object model, and PyMechanical provides
+exactly that API to Python. Because object models are not suitable as remote
+APIs, PyMechanical does not provide that API in a remote fashion. This is why
+the remote session API is based on strings, while the embedded instance API can
+provide the Mechanical API directly to Python.
+
+A different remote interface
+----------------------------
+
+An alternative remote API for Mechanical is practical so long as it is not
+using RMI. In fact, Mechanical uses a REST API internally as part of its GUI.
+This is not the official Mechanical API and is not currently documented. A new
+remote interface for Mechanical is not an immediate goal of PyMechanical.
+
+Using PyMechanical in a distributed system
+------------------------------------------
+
+You can still build a distributed system where Mechanical is run remotely using
+the embedded instance of Mechanical in PyMechanical. For this to work, Python
+itself would run remotely, and therefore the embedded instance would run
+remotely. The communication across the network in that system would be done in
+Python.
+
+
+.. rubric:: Footnotes
+
+.. [#f1] This means that it is implemented using more than one programming language.
+.. [#f2] The Python programming language is in fact only a specification of a language. CPython is the reference implementation developed by the creator of Python. There are others, including IronPython, PyPy, Cinder, and GraalPy.
+.. [#f3] IronPython is an implementation of the Python programming language using the DLR from .NET. It does not implement the Python/C API, which is why many Python packages cannot run within IronPython. It also currently only implements Python2.7.
+.. [#f4] *Undo* and *redo* are often implemented using a command pattern. They store all executed commands in a stack. Each command not only has the ability to execute, it also has the ability to undo itself. Undo and redo are then implemented by walking up and down the stack and executing the Command or its inverse function.
+.. [#f5] The Internet Protocol (IP) model is a layered description and specification that describes how information moves on the internet.
+.. [#f6] Actually, for normal procedure calls within an address space, there needs to be a similar handshake about how the inputs and arguments are passed. This is called a calling convention, and describes what to do with CPU registers.
+.. [#f7] HTTPS, HTTP/2, and HTTP/3.
\ No newline at end of file
diff --git a/version/0.11/_sources/changelog.rst.txt b/version/0.11/_sources/changelog.rst.txt
new file mode 100644
index 000000000..49c8e4faa
--- /dev/null
+++ b/version/0.11/_sources/changelog.rst.txt
@@ -0,0 +1,993 @@
+.. _ref_release_notes:
+
+Release notes
+#############
+
+This document contains the release notes for the project.
+
+.. vale off
+
+.. towncrier release notes start
+
+`0.11.1 `_ - 2024-06-21
+
+
+Added
+^^^^^
+
+- FEAT: Add an App method to print project tree for embedding scenario `#779 `_
+
+
+Changed
+^^^^^^^
+
+- Test specific version `#771 `_
+- chore: update CHANGELOG for v0.11.0 `#777 `_
+- chore: bump add-license-headers version to 0.3.2 `#782 `_
+
+
+Fixed
+^^^^^
+
+- fix sharing app instances, clarify contract `#784 `_
+
+`0.11.0 `_ - 2024-06-18
+===================================================================================
+
+
+Added
+^^^^^
+
+- feat: raise an exception if port or input script aren't provided in batch mode `#753 `_
+- feat: use changelog.rst instead of CHANGELOG.md for release notes `#757 `_
+- Doc: Add embedding api references `#758 `_
+- feat: implement autoapi `#761 `_
+
+
+Changed
+^^^^^^^
+
+- chore: update CHANGELOG for v0.10.11 `#749 `_
+- MAINT: Delete the apt-get lists after installing packages `#750 `_
+- [pre-commit.ci] pre-commit autoupdate `#774 `_
+
+
+Fixed
+^^^^^
+
+- FIX: Modify pre-commit hook `#763 `_
+- fix lifetime issue `#768 `_
+- fix pythonnet issue `#772 `_
+- Fix: Remove disable sec check `#776 `_
+
+
+Dependencies
+^^^^^^^^^^^^
+
+- MAINT: Bump the doc group with 4 updates `#751 `_
+- [pre-commit.ci] pre-commit autoupdate `#752 `_
+- MAINT: Bump the doc group with 3 updates `#755 `_
+- MAINT: Update files as per pyansys standards `#762 `_
+- MAINT: Bump grpcio from 1.64.0 to 1.64.1 in the core group `#764 `_
+- MAINT: Bump pytest from 8.2.1 to 8.2.2 in the tests group `#765 `_
+- MAINT: Bump the doc group with 2 updates `#766 `_
+
+
+Miscellaneous
+^^^^^^^^^^^^^
+
+- add method to update globals `#767 `_
+
+`0.10.11 `__ - 2024-05-23
+======================================================================================
+
+Added
+^^^^^
+
+- feat: Add tests for animation exports
+ `#729 `__
+- add feature flags to ansys-mechanical cli
+ `#735 `__
+- feat: Add test for deprecation warning
+ `#739 `__
+
+Changed
+^^^^^^^
+
+- chore: update CHANGELOG for v0.10.10
+ `#716 `__
+- Maint: Display image info
+ `#717 `__
+- [pre-commit.ci] pre-commit autoupdate
+ `#726 `__
+- set mono trace env vars before loading mono
+ `#734 `__
+
+Fixed
+^^^^^
+
+- fix: merging coverage step in ci_cd
+ `#720 `__
+- fix: Publish coverage for remote connect
+ `#721 `__
+- fix: Restrict ``protobuf`` <6
+ `#722 `__
+- Fix: add return for poster
+ `#727 `__
+- fix: cli test are not getting coverage
+ `#737 `__
+- fix: adding mechanical libraries
+ `#740 `__
+- feat: Add more coverage on logging
+ `#744 `__
+- fix: Display image and build info only for scheduled run
+ `#746 `__
+- fix: upload coverage files only for latest stable version on release
+ workflow `#748 `__
+
+Dependencies
+^^^^^^^^^^^^
+
+- MAINT: Bump pytest from 8.1.1 to 8.2.0 in the tests group
+ `#724 `__
+- MAINT: Bump the doc group with 3 updates
+ `#725 `__,
+ `#743 `__
+- MAINT: Bump grpcio from 1.62.2 to 1.63.0 in the core group
+ `#731 `__
+- MAINT: Bump the doc group with 2 updates
+ `#732 `__
+- MAINT: Bump grpcio from 1.63.0 to 1.64.0 in the core group
+ `#741 `__
+- MAINT: Bump pytest from 8.2.0 to 8.2.1 in the tests group
+ `#742 `__
+
+Miscellaneous
+^^^^^^^^^^^^^
+
+- Split pyvista into two methods and remove the stability workaround
+ for 242 `#718 `__
+- Update conf.py
+ `#723 `__
+- catch the mono version warning
+ `#733 `__
+
+
+`0.10.10 `__ - 2024-04-23
+======================================================================================
+
+
+Added
+^^^^^
+
+- Add embedding_scripts marker
+ `#662 `__
+- FEAT: Group dependabot alerts
+ `#666 `__
+- add windows library loader util
+ `#672 `__
+- Feat: Add reports for remote connect tests
+ `#690 `__
+- Feat: Add link check
+ `#693 `__
+- Feat: Add app libraries test
+ `#696 `__
+- Feat: Update ``get_mechanical_path``
+ `#707 `__
+- Feat: ``mechanical-env`` check before running embedding
+ `#708 `__
+- feat: set up doc-deploy-changelog action
+ `#710 `__
+
+
+Changed
+^^^^^^^
+
+- Doc: fix docs and vale warning
+ `#656 `__
+- Maint: post release change log update 10.9
+ `#665 `__
+- Maint: Auto approve and merge dependabot PR
+ `#674 `__
+- [pre-commit.ci] pre-commit autoupdate
+ `#691 `__,
+ `#706 `__
+- Maint: Add code cov report
+ `#692 `__
+- Maint: Modify nightly run
+ `#712 `__
+
+
+Fixed
+^^^^^
+
+- Fix: Assign ci bot for dependabot PR
+ `#677 `__
+- Fix: Add matrix python in embedding test
+ `#681 `__
+- Fix: Remove warning message test for remote session launch
+ `#682 `__
+- fix transformation matrix
+ `#683 `__
+- Fix: Modify retrieving path of Mechanical in tests
+ `#688 `__
+- work around instability in 2024R1
+ `#695 `__
+
+
+Dependencies
+^^^^^^^^^^^^
+
+- MAINT: Bump the doc group with 2 updates
+ `#668 `__,
+ `#673 `__
+- MAINT: Bump the doc group with 1 update
+ `#678 `__
+- first version of 3d visualization with pyvista
+ `#680 `__
+- MAINT: Bump the doc group with 3 updates
+ `#689 `__
+- add open-usd exporter
+ `#701 `__
+- MAINT: Bump the doc group with 5 updates
+ `#705 `__,
+ `#715 `__
+- MAINT: Bump grpcio from 1.62.1 to 1.62.2 in the core group
+ `#713 `__
+- MAINT: Bump ansys/actions from 5 to 6
+ `#714 `__
+
+
+Miscellaneous
+^^^^^^^^^^^^^
+
+- cleanup `#702 `__
+- update graphics based on backend changes
+ `#711 `__
+
+
+`0.10.9  +
+ 

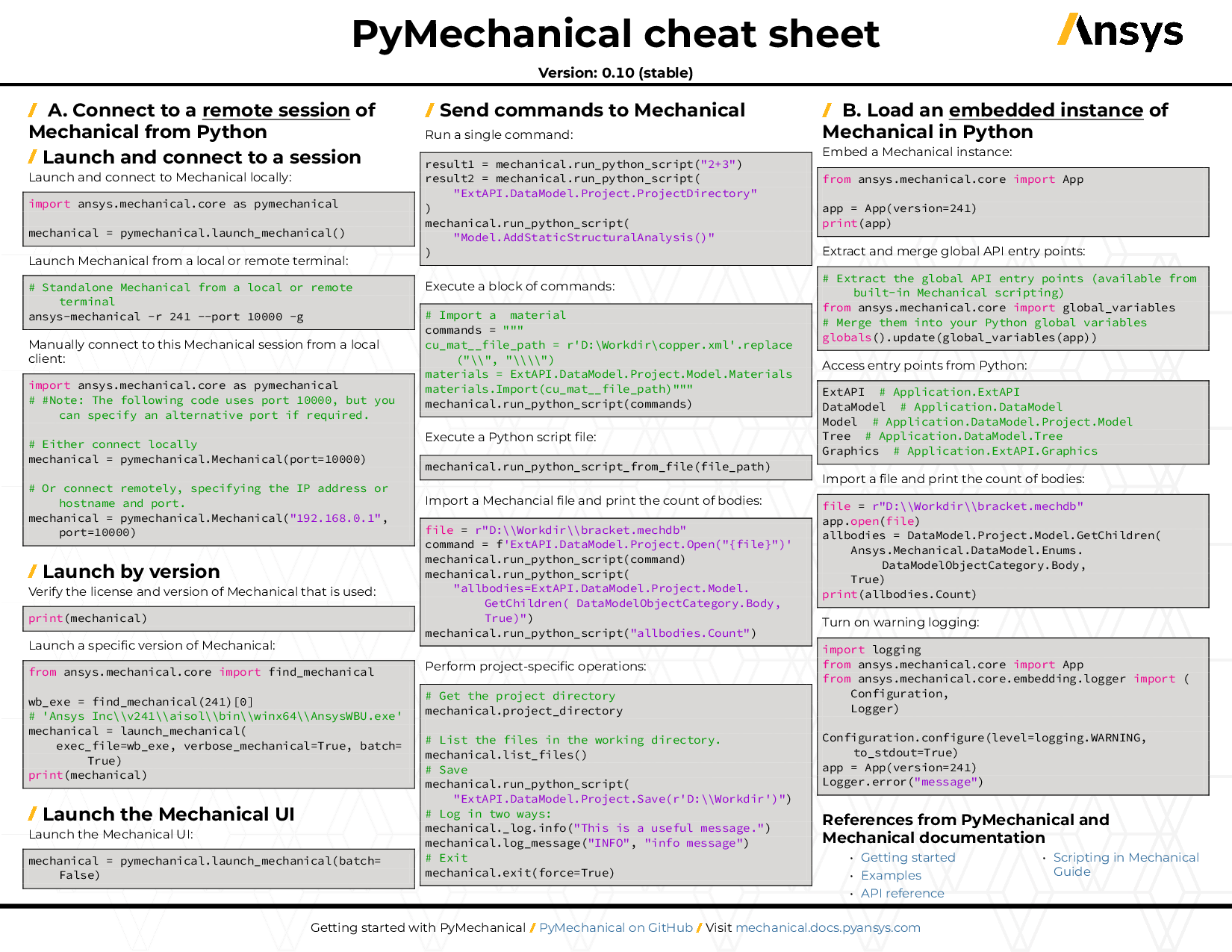{kind=link}