Back to Projects List
- Caroline Essert (ICUBE / Université de Strasbourg)
- Jean-Christophe Fillon-Robin (Kitware Inc.)
- Nicole Aucoin (Harmonus Inc.)
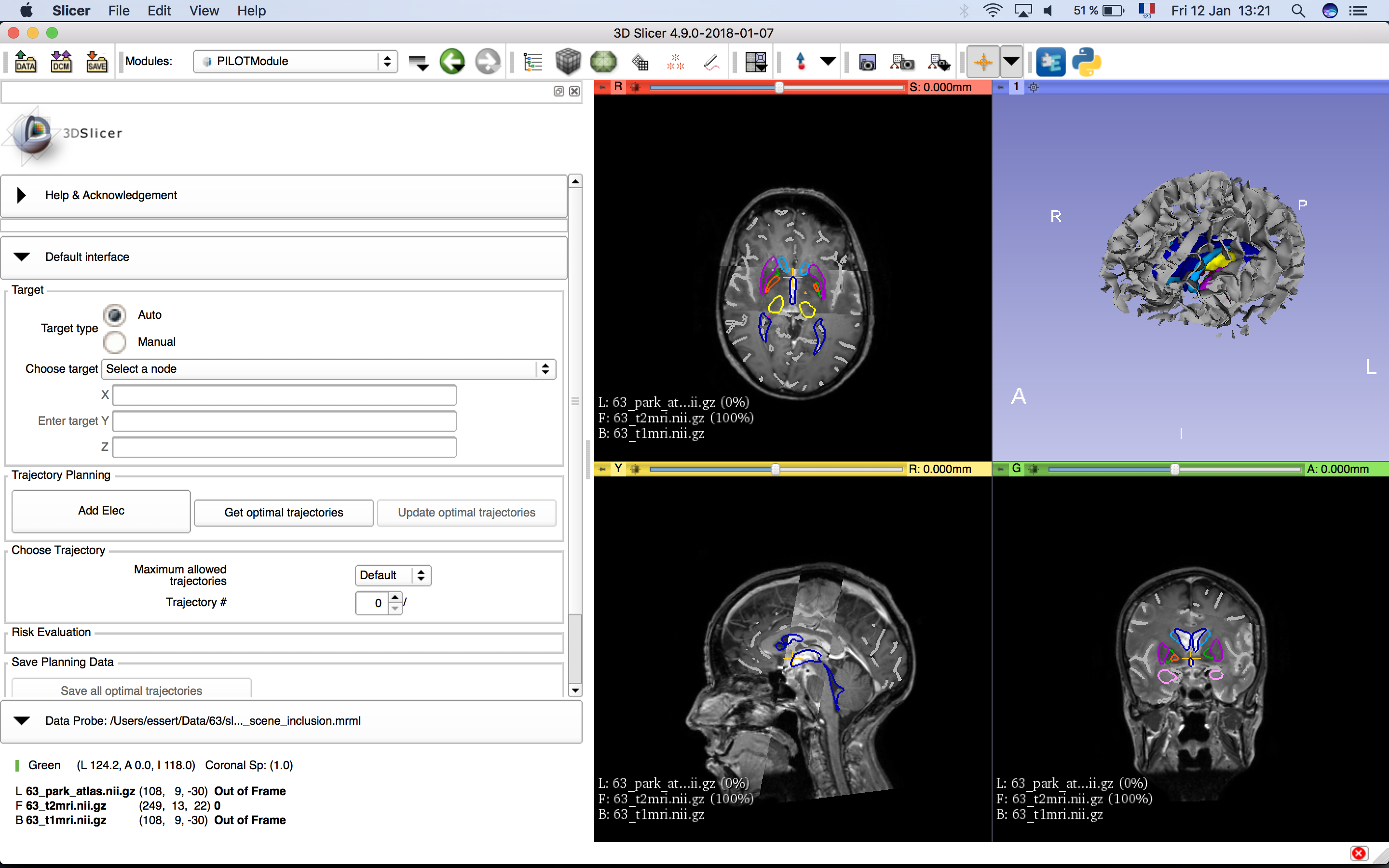
- Make the MITK plugin PILOT for needle/electrode trajectory planning compatible with 3D Slicer
- Create a Slicer module and plug PILOT in it
Progress:
- Built Slicer on Mac OSX
- Created a new extension with a loadable module in C++
- Modified the UI to match the MITK PILOT plugin UI
- Familiarized with the concepts of mrml scene, nodes, and connections in Slicer, thei link with vtk data structures, and made the link with MITK similar concepts
- Started playing with the "manual" modification of nodes and vtkpolydatas
- Started the process of building the core files of PILOT plugin along with Slicer (ongoing...)
Next steps:
- Finish the build
- Link UI widgets to functions in the PILOT code
- Test !
A short video of the MITK plugin in action: https://youtu.be/JG1hFJkmvtA